Hi Louis, i have tried using the C++ Demo to do realtime text recognition. I’m using your DenseNet CTC demo, using the cv::VideoCapture, and run postprocess_densenet_ctc for each frame, but i got set input size too big, please check it error.
My Code:
/****************************************************************************
*
* Copyright (c) 2019 by amlogic Corp. All rights reserved.
*
* The material in this file is confidential and contains trade secrets
* of amlogic Corporation. No part of this work may be disclosed,
* reproduced, copied, transmitted, or used in any way for any purpose,
* without the express written permission of amlogic Corporation.
*
***************************************************************************/
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "nn_sdk.h"
#include "nn_util.h"
#include "postprocess_util.h"
#include <opencv2/objdetect/objdetect.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/imgcodecs.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/types_c.h>
#include <opencv2/opencv.hpp>
#include <opencv2/imgproc/imgproc_c.h>
#include <getopt.h>
#include <sys/time.h>
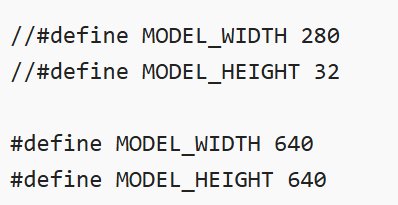
//#define MODEL_WIDTH 280
//#define MODEL_HEIGHT 32
#define MODEL_WIDTH 640
#define MODEL_HEIGHT 640
#define DEFAULT_WIDTH 1280
#define DEFAULT_HEIGHT 720
int default_width = DEFAULT_WIDTH;
int default_height = DEFAULT_HEIGHT;
struct option longopts[] = {
{ "model", required_argument, NULL, 'm' },
{ "width", required_argument, NULL, 'w' },
{ "height", required_argument, NULL, 'h' },
{ "help", no_argument, NULL, 'H' },
{ 0, 0, 0, 0 }
};
nn_input inData;
cv::Mat img;
aml_module_t modelType;
static int input_width,input_high,input_channel;
typedef enum _amlnn_detect_type_ {
Accuracy_Detect_Yolo_V3 = 0
} amlnn_detect_type;
void* init_network_file(const char *mpath) {
void *qcontext = NULL;
aml_config config;
memset(&config, 0, sizeof(aml_config));
config.nbgType = NN_ADLA_FILE;
config.path = mpath;
config.modelType = ADLA_LOADABLE;
config.typeSize = sizeof(aml_config);
qcontext = aml_module_create(&config);
if (qcontext == NULL) {
printf("amlnn_init is fail\n");
return NULL;
}
if (config.nbgType == NN_ADLA_MEMORY && config.pdata != NULL) {
free((void*)config.pdata);
}
return qcontext;
}
//int set_input(void *qcontext, const cv::Mat jimg) {
// int ret = 0;
// int input_size = 0;
// int hw = input_width*input_high;
// unsigned char *rawdata = NULL;
// cv::Mat temp_img(MODEL_WIDTH, MODEL_HEIGHT, CV_8UC1),normalized_img;
//img = cv::imread(jmat, 0);
// int width = jimg.cols;
// int height = jimg.rows;
// cv::resize(jimg, temp_img, cv::Size(MODEL_WIDTH, MODEL_HEIGHT));
// temp_img.convertTo(normalized_img, CV_32FC1, 1.0 / 255.0);
// rawdata = normalized_img.data;
// inData.input_type = RGB24_RAW_DATA;
// inData.input = rawdata;
// inData.input_index = 0;
// inData.size = input_width * input_high * input_channel * sizeof(float);
// ret = aml_module_input_set(qcontext, &inData);
// return ret;
//}
int run_network(void *qcontext) {
//int ret = 0;
//nn_output *outdata = NULL;
//aml_output_config_t outconfig;
//memset(&outconfig, 0, sizeof(aml_output_config_t));
//outconfig.format = AML_OUTDATA_RAW;//AML_OUTDATA_RAW or AML_OUTDATA_FLOAT32
//outconfig.typeSize = sizeof(aml_output_config_t);
//outdata = (nn_output*)aml_module_output_get(qcontext, outconfig);
//if (outdata == NULL) {
// printf("aml_module_output_get error\n");
// return -1;
//}
//char result[35] = {0};
//int result_len = 0;
//postprocess_densenet_ctc(outdata, result, &result_len);
//printf("%d\n", result_len);
//printf("%s\n", result);
//return ret;
int ret = 0;
int frames = 0;
nn_output *outdata = NULL;
struct timeval time_start, time_end;
float total_time = 0;
aml_output_config_t outconfig;
memset(&outconfig, 0, sizeof(aml_output_config_t));
outconfig.format = AML_OUTDATA_FLOAT32;//AML_OUTDATA_RAW or AML_OUTDATA_FLOAT32
outconfig.typeSize = sizeof(aml_output_config_t);
outconfig.order = AML_OUTPUT_ORDER_NCHW;
obj_detect_out_t yolov3_detect_out;
cv::namedWindow("Image Window");
int input_size = 0;
int hw = input_width*input_high;
unsigned char *rawdata = NULL;
cv::Mat temp_img(MODEL_WIDTH, MODEL_HEIGHT, CV_8UC1);
inData.input_type = RGB24_RAW_DATA;
inData.input_index = 0;
inData.size = input_width * input_high * input_channel;
std::string pipeline = std::string("v4l2src device=/dev/media0 io-mode=mmap ! video/x-raw,format=NV12,width=") + std::to_string(default_width) + std::string(",height=") + std::to_string(default_height) + std::string(",framerate=30/1 ! videoconvert ! appsink");
cv::VideoCapture cap(pipeline);
gettimeofday(&time_start, 0);
if (!cap.isOpened()) {
std::cout << "capture device failed to open!" << std::endl;
cap.release();
exit(-1);
}
while(1) {
gettimeofday(&time_start, 0);
if (!cap.read(img)) {
std::cout<<"Capture read error"<<std::endl;
break;
}
printf("Input");
cv::resize(img, temp_img, cv::Size(MODEL_WIDTH, MODEL_HEIGHT));
cv::cvtColor(temp_img, temp_img, cv::COLOR_RGB2BGR);
inData.input = temp_img.data;
// gettimeofday(&time_start, 0);
ret = aml_module_input_set(qcontext, &inData);
if (ret != 0) {
printf("set_input fail.\n");
return -1;
}
outdata = (nn_output*)aml_module_output_get(qcontext, outconfig);
if (outdata == NULL) {
printf("aml_module_output_get error\n");
return -1;
}
printf("Output");
++frames;
total_time += (float)((time_end.tv_sec - time_start.tv_sec) + (time_end.tv_usec - time_start.tv_usec) / 1000.0f / 1000.0f);
if (total_time >= 1.0f) {
int fps = (int)(frames / total_time);
printf("Inference FPS: %i\n", fps);
frames = 0;
total_time = 0;
}
char result[35] = {0};
int result_len = 0;
printf("Start DenseNet CTC");
postprocess_densenet_ctc(outdata, result, &result_len);
printf("Result of DenseNet CTC");
printf("%d\n", result_len);
printf("%s\n", result);
cv::imshow("Image Window",img);
cv::waitKey(1);
}
return ret;
}
int destroy_network(void *qcontext) {
int ret = aml_module_destroy(qcontext);
return ret;
}
int main(int argc,char **argv)
{
int c;
int ret = 0;
void *context = NULL;
char *model_path = NULL;
//char *input_data = NULL;
input_width = MODEL_WIDTH;
input_high = MODEL_HEIGHT;
//input_channel = 1;
input_channel = 3;
while ((c = getopt_long(argc, argv, "m:w:h:H", longopts, NULL)) != -1) {
switch (c) {
case 'w':
default_width = atoi(optarg);
break;
case 'h':
default_height = atoi(optarg);
break;
case 'm':
model_path = optarg;
break;
//case 'p':
// input_data = optarg;
// break;
default:
printf("%s[-m model path] [-w camera width] [-h camera height] [-H]\n", argv[0]);
exit(1);
}
}
context = init_network_file(model_path);
if (context == NULL) {
printf("init_network fail.\n");
return -1;
}
//ret = set_input(context, input_data);
//if (ret != 0) {
// printf("set_input fail.\n");
// return -1;
//}
ret = run_network(context);
if (ret != 0) {
printf("run_network fail.\n");
return -1;
}
ret = destroy_network(context);
if (ret != 0) {
printf("destroy_network fail.\n");
return -1;
}
return ret;
}
The Error I Got:
QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-root'
WARNING: Some incorrect rendering might occur because the selected Vulkan device (Mali-G52) doesn't support base Zink requirements: feats.features.logicOp feats.features.fillModeNonSolid feats.features.shaderClipDistance
[API:aml_v4l2src_connect:271]Enter, devname : /dev/media0
func_name: aml_src_get_cam_method
initialize func addr: 0x7f6c9f167c
finalize func addr: 0x7f6c9f1948
start func addr: 0x7f6c9f199c
stop func addr: 0x7f6c9f1a4c
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:235:carm_src_is_usb]carm_src_is_usb:info(id 1, type 0x20000, name isp-csiphy), ret 0
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:235:carm_src_is_usb]carm_src_is_usb:info(id 4, type 0x20000, name isp-adapter), ret 0
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:235:carm_src_is_usb]carm_src_is_usb:info(id 7, type 0x20000, name isp-test-pattern-gen), ret 0
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:235:carm_src_is_usb]carm_src_is_usb:info(id 9, type 0x20000, name isp-core), ret 0
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:235:carm_src_is_usb]carm_src_is_usb:info(id 20, type 0x20001, name imx415-0), ret 0
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:235:carm_src_is_usb]carm_src_is_usb:info(id 24, type 0x10001, name isp-ddr-input), ret 0
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:235:carm_src_is_usb]carm_src_is_usb:info(id 28, type 0x10001, name isp-param), ret 0
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:235:carm_src_is_usb]carm_src_is_usb:info(id 32, type 0x10001, name isp-stats), ret 0
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:235:carm_src_is_usb]carm_src_is_usb:info(id 36, type 0x10001, name isp-output0), ret 0
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:235:carm_src_is_usb]carm_src_is_usb:info(id 40, type 0x10001, name isp-output1), ret 0
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:235:carm_src_is_usb]carm_src_is_usb:info(id 44, type 0x10001, name isp-output2), ret 0
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:235:carm_src_is_usb]carm_src_is_usb:info(id 48, type 0x10001, name isp-output3), ret 0
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:235:carm_src_is_usb]carm_src_is_usb:info(id 52, type 0x10001, name isp-raw), ret 0
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:235:carm_src_is_usb]carm_src_is_usb:info(id -2147483596, type 0x0, name ), ret -1
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:239:carm_src_is_usb]carm_src_is_usb:error Invalid argument
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:79:cam_src_select_socket]select socket:/tmp/camctrl0.socket
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:103:cam_src_obtain_devname]fork ok, pid:7369
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:103:cam_src_obtain_devname]fork ok, pid:0
[2024-10-22 07:42:39] DEBUG [amlv4l2src camsrc.c:107:cam_src_obtain_devname]execl /usr/bin/camctrl
[2024-10-22 07:42:39] DEBUG [amlv4l2src camctrl.cc:925:main][camctrl.cc:main:925]
[2024-10-22 07:42:39] DEBUG [amlv4l2src camctrl.cc:889:parse_opt]media device name: /dev/media0
[2024-10-22 07:42:39] DEBUG [amlv4l2src camctrl.cc:898:parse_opt]Server socket: /tmp/camctrl0.socket
Opening media device /dev/media0
Enumerating entities
Found 13 entities
Enumerating pads and links
mediaStreamInit[35]: mediaStreamInit ++.
mediaStreamInit[39]: media devnode: /dev/media0
mediaStreamInit[56]: ent 0, name isp-csiphy
mediaStreamInit[56]: ent 1, name isp-adapter
mediaStreamInit[56]: ent 2, name isp-test-pattern-gen
mediaStreamInit[56]: ent 3, name isp-core
mediaStreamInit[56]: ent 4, name imx415-0
mediaStreamInit[56]: ent 5, name isp-ddr-input
mediaStreamInit[56]: ent 6, name isp-param
mediaStreamInit[56]: ent 7, name isp-stats
mediaStreamInit[56]: ent 8, name isp-output0
mediaStreamInit[56]: ent 9, name isp-output1
mediaStreamInit[56]: ent 10, name isp-output2
mediaStreamInit[56]: ent 11, name isp-output3
mediaStreamInit[56]: ent 12, name isp-raw
mediaStreamInit[96]: get lens_ent fail
mediaLog[30]: v4l2_video_open: open subdev device node /dev/video63 ok, fd 5
mediaStreamInit[151]: mediaStreamInit open video0 fd 5
mediaLog[30]: v4l2_video_open: open subdev device node /dev/video64 ok, fd 6
mediaStreamInit[155]: mediaStreamInit open video1 fd 6
mediaLog[30]: v4l2_video_open: open subdev device node /dev/video65 ok, fd 7
mediaStreamInit[159]: mediaStreamInit open video2 fd 7
mediaLog[30]: v4l2_video_open: open subdev device node /dev/video66 ok, fd 8
mediaStreamInit[163]: mediaStreamInit open video3 fd 8
mediaStreamInit[172]: media stream init success
fetchPipeMaxResolution[27]: find matched sensor configs 3840x2160
media_set_wdrMode[420]: media_set_wdrMode ++ wdr_mode : 0
media_set_wdrMode[444]: media_set_wdrMode success --
media_set_wdrMode[420]: media_set_wdrMode ++ wdr_mode : 4
media_set_wdrMode[444]: media_set_wdrMode success --
[2024-10-22 07:42:40] DEBUG [amlv4l2src camctrl.cc:374:link_and_activate_subdev]link and activate subdev successfully
[2024-10-22 07:42:40] DEBUG [amlv4l2src camctrl.cc:407:media_stream_config]config media stream successfully
mediaLog[30]: v4l2_video_open: open subdev device node /dev/video62 ok, fd 13
mediaLog[30]: VIDIOC_QUERYCAP: success
[2024-10-22 07:42:40] DEBUG [amlv4l2src camctrl.cc:172:check_capability]entity[isp-stats] -> video[/dev/video62], cap.driver:aml-camera, capabilities:0x85200001, device_caps:0x5200001
mediaLog[30]: v4l2_video_open: open subdev device node /dev/video61 ok, fd 14
mediaLog[30]: VIDIOC_QUERYCAP: success
[2024-10-22 07:42:40] DEBUG [amlv4l2src camctrl.cc:172:check_capability]entity[isp-param] -> video[/dev/video61], cap.driver:aml-camera, capabilities:0x85200001, device_caps:0x5200001
mediaLog[30]: set format ok, ret 0.
mediaLog[30]: set format ok, ret 0.
mediaLog[30]: request buf ok
mediaLog[30]: request buf ok
mediaLog[30]: query buffer success
[2024-10-22 07:42:40] DEBUG [amlv4l2src camctrl.cc:546:isp_alg_param_init]isp stats query buffer, length: 262144, offset: 0
mediaLog[30]: query buffer success
[2024-10-22 07:42:40] DEBUG [amlv4l2src camctrl.cc:546:isp_alg_param_init]isp stats query buffer, length: 262144, offset: 262144
mediaLog[30]: query buffer success
[2024-10-22 07:42:40] DEBUG [amlv4l2src camctrl.cc:546:isp_alg_param_init]isp stats query buffer, length: 262144, offset: 524288
mediaLog[30]: query buffer success
[2024-10-22 07:42:40] DEBUG [amlv4l2src camctrl.cc:546:isp_alg_param_init]isp stats query buffer, length: 262144, offset: 786432
mediaLog[30]: query buffer success
[2024-10-22 07:42:40] DEBUG [amlv4l2src camctrl.cc:568:isp_alg_param_init]isp param query buffer, length: 262144, offset: 0
alg2User func addr: 0x7fab7f8ed8
alg2Kernel func addr: 0x7fab7f8f08
algEnable func addr: 0x7fab7f8d70
algDisable func addr: 0x7fab7f8e90
algFwInterface func addr: 0x7fab7f9008
matchLensConfig[43]: LKK: fail to match lensConfig
cmos_get_ae_default_imx415[65]: cmos_get_ae_default
cmos_get_ae_default_imx415[116]: cmos_get_ae_default++++++
cmos_get_ae_default_imx415[65]: cmos_get_ae_default
cmos_get_ae_default_imx415[116]: cmos_get_ae_default++++++
aisp_enable[984]: tuning device not exist!
aisp_enable[987]: 3a commit b56e430e80b995bb88cecff66a3a6fc17abda2c7
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 16351232, 0, 0, 0
mediaLog[30]: streamon success
mediaLog[30]: streamon success
[2024-10-22 07:42:40] DEBUG [amlv4l2src camctrl.cc:650:isp_alg_param_init]Finish initializing amlgorithm parameter ...
[2024-10-22 07:42:40] DEBUG [amlv4l2src camctrl.cc:971:main]UNIX domain socket bound
[2024-10-22 07:42:40] DEBUG [amlv4l2src camctrl.cc:977:main]Accepting connections ...
[2024-10-22 07:42:40] DEBUG [amlv4l2src camsrc.c:122:cam_src_obtain_devname]udp_sock_create
[2024-10-22 07:42:40] DEBUG [amlv4l2src common/common.c:70:udp_sock_create][453321940][/tmp/camctrl0.socket] start connect
[2024-10-22 07:42:40] DEBUG [amlv4l2src camsrc.c:124:cam_src_obtain_devname]udp_sock_recv
[2024-10-22 07:42:40] DEBUG [amlv4l2src camctrl.cc:985:main]connected_sockfd: 20
[2024-10-22 07:42:40] DEBUG [amlv4l2src camctrl.cc:989:main]video_dev_name: /dev/video63
[2024-10-22 07:42:40] DEBUG [amlv4l2src camsrc.c:282:cam_src_initialize]obtain devname: /dev/video63
devname : /dev/video63
driver : aml-camera
device : Amlogic Camera Card
bus_info : platform:aml-cam
version : 331657
error tvin-port use -1
[API:aml_v4l2src_streamon:373]Enter
[2024-10-22 07:42:40] DEBUG [amlv4l2src camsrc.c:298:cam_src_start]start ...
[API:aml_v4l2src_streamon:376]Exit
[2024-10-22 07:42:40] DEBUG [amlv4l2src camctrl.cc:860:process_socket_thread]receive streamon notification
cmos_again_calc_table_imx415[125]: cmos_again_calc_table: 1836, 1836
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 11046912, 11046912, 11046912, 11046912
cmos_again_calc_table_imx415[125]: cmos_again_calc_table: 0, 0
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 14585856, 14585856, 14585856, 14585856
[ WARN:0@1.792] global ./modules/videoio/src/cap_gstreamer.cpp (1405) open OpenCV | GStreamer warning: Cannot query video position: status=0, value=-1, duration=-1
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 13967360, 13967360, 13967360, 13967360
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 13545472, 13545472, 13545472, 13545472
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 13185024, 13185024, 13185024, 13185024
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12959744, 12959744, 12959744, 12959744
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12816384, 12816384, 12816384, 12816384
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12697600, 12697600, 12697600, 12697600
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12693504, 12693504, 12693504, 12693504
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12689408, 12689408, 12689408, 12689408
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12685312, 12685312, 12685312, 12685312
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12681216, 12681216, 12681216, 12681216
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12677120, 12677120, 12677120, 12677120
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12673024, 12673024, 12673024, 12673024
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12668928, 12668928, 12668928, 12668928
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12664832, 12664832, 12664832, 12664832
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12660736, 12660736, 12660736, 12660736
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12656640, 12656640, 12656640, 12656640
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12652544, 12652544, 12652544, 12652544
OutputStart DenseNet CTCResult of DenseNet CTC0
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12648448, 12648448, 12648448, 12648448
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12644352, 12644352, 12644352, 12644352
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
cmos_inttime_calc_table_imx415[150]: cmos_inttime_calc_table: 12640256, 12640256, 12640256, 12640256
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
InputE NN_SDK:[aml_adla_inputs_set_off:812]Error: set input size too big, please check it! [1228800] : [35840]
OutputStart DenseNet CTCResult of DenseNet CTC0
The Video is displaying on a Window but no text recognition is happening.
How do i fix the input size too big error? Or is my approach wrong?