Which system do you use? Android, Ubuntu, OOWOW or others?
VIM3_Ubuntu-gnome-focal_Linux-4.9_arm64_SD-USB_V1.0.7-210625
NPU驱动版本如下

Which version of system do you use? Please provide the version of the system here:
Ubuntu20.04.2
Please describe your issue below:
我使用 aml_npu_sdk_ddk-6.4.8.7-250427 工具包,成功将自定义的 YOLOv8 ONNX 模型转换成了 .nb 格式模型。整个转换过程未出现报错,对应的 .so 库文件也已正常生成。
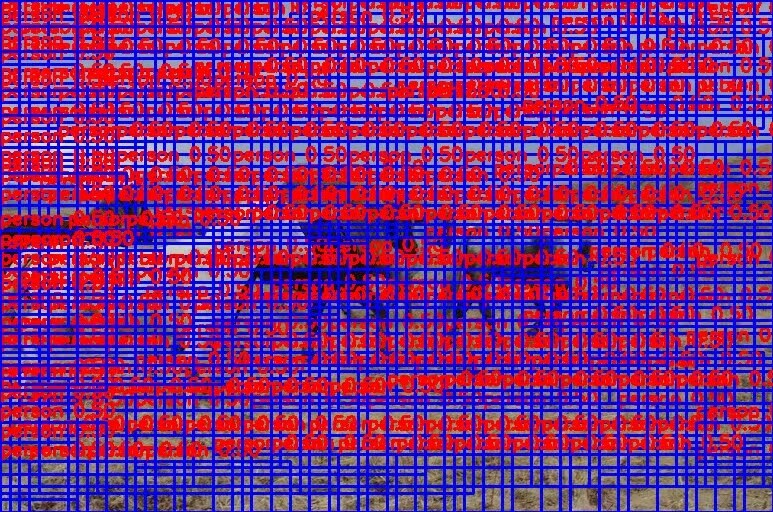
但我将 .nb 模型和 .so 库文件一并拷贝到 VIM3 开发板后,使用 KSNN 1.4 执行推理时,检测结果出现明显异常:
输入图片里实际是马匹,模型却错误识别为人;
画面中生成了大量错误的检测框;
模型输出结果杂乱、噪点严重。
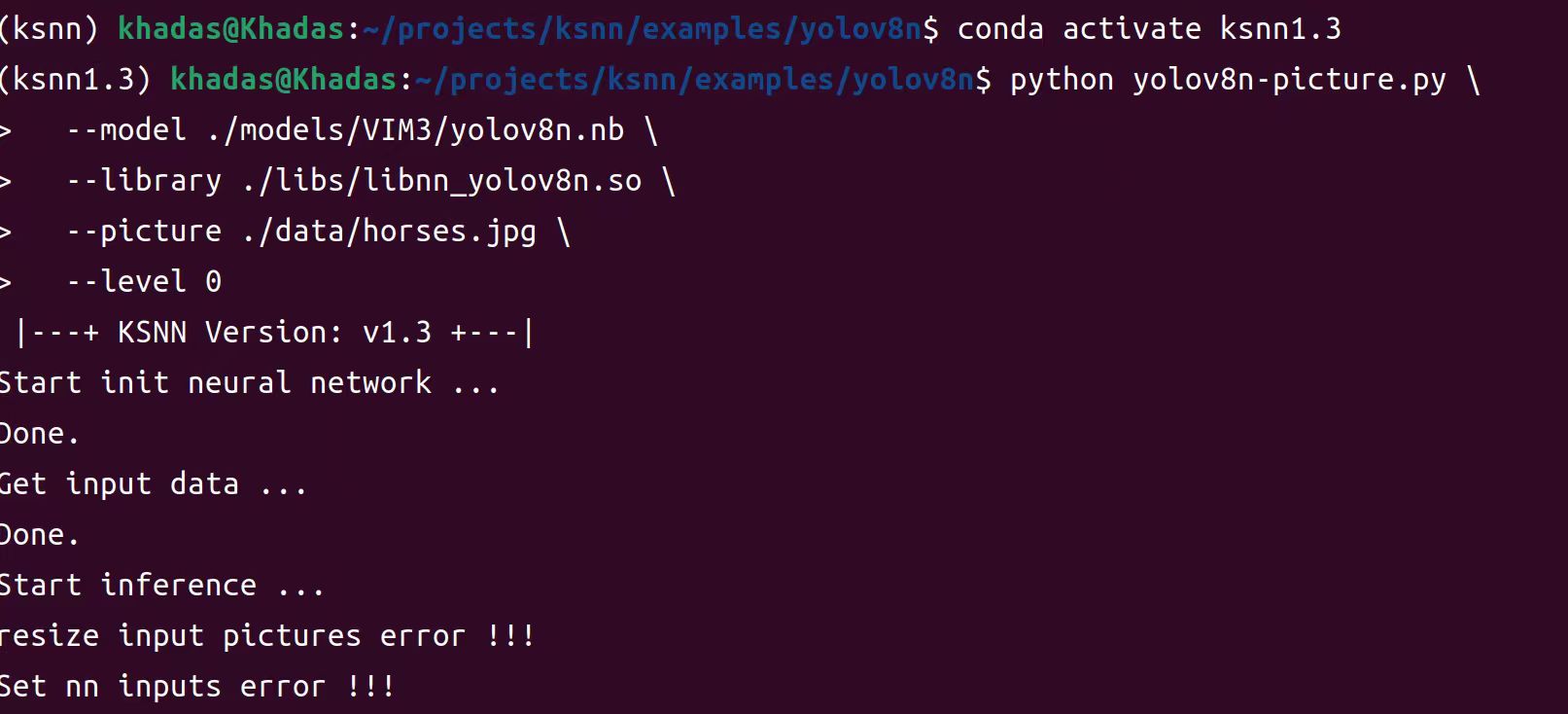
随后我切换到 KSNN 1.3 环境运行该模型,推理操作直接彻底失败,报错信息如下:
* resize input pictures error
* Set nn inputs error
最终程序完全没有输出任何检测结果。
除此之外,我还测试了 Khadas 官方提供的 YOLOv8 标准 .nb 模型及其配套的 .so 库文件,出现了完全相同的问题,检测结果也依旧异常。
Post a console log of your issue below:
这是我的yolov8n-picture.py,目前没有进行任何修改
import numpy as np
import os
import urllib.request
import argparse
import sys
import math
from ksnn.api import KSNN
from ksnn.types import *
import cv2 as cv
import time
GRID0 = 20
GRID1 = 40
GRID2 = 80
LISTSIZE = 144
SPAN = 1
NUM_CLS = 80
MAX_BOXES = 500
OBJ_THRESH = 0.4
NMS_THRESH = 0.5
mean = [0, 0, 0]
var = [255]
os.environ["QT_QPA_PLATFORM"] = "xcb"
constant_martix = np.array([[0, 1, 2, 3,
4, 5, 6, 7,
8, 9, 10, 11,
12, 13, 14, 15]]).T
CLASSES = ("person", "bicycle", "car","motorbike ","aeroplane ","bus ","train","truck ","boat","traffic light",
"fire hydrant","stop sign ","parking meter","bench","bird","cat","dog ","horse ","sheep","cow","elephant",
"bear","zebra ","giraffe","backpack","umbrella","handbag","tie","suitcase","frisbee","skis","snowboard","sports ball","kite",
"baseball bat","baseball glove","skateboard","surfboard","tennis racket","bottle","wine glass","cup","fork","knife ",
"spoon","bowl","banana","apple","sandwich","orange","broccoli","carrot","hot dog","pizza ","donut","cake","chair","sofa",
"pottedplant","bed","diningtable","toilet ","tvmonitor","laptop ","mouse ","remote ","keyboard ","cell phone","microwave ",
"oven ","toaster","sink","refrigerator ","book","clock","vase","scissors ","teddy bear ","hair drier", "toothbrush ")
def sigmoid(x):
return 1 / (1 + np.exp(-x))
def softmax(x, axis=0):
x = np.exp(x)
return x / x.sum(axis=axis, keepdims=True)
def process(input):
grid_h, grid_w = map(int, input.shape[0:2])
box_class_probs = sigmoid(input[..., :NUM_CLS])
box_0 = softmax(input[..., NUM_CLS: NUM_CLS + 16], -1)
box_1 = softmax(input[..., NUM_CLS + 16:NUM_CLS + 32], -1)
box_2 = softmax(input[..., NUM_CLS + 32:NUM_CLS + 48], -1)
box_3 = softmax(input[..., NUM_CLS + 48:NUM_CLS + 64], -1)
result = np.zeros((grid_h, grid_w, 1, 4))
result[..., 0] = np.dot(box_0, constant_martix)[..., 0]
result[..., 1] = np.dot(box_1, constant_martix)[..., 0]
result[..., 2] = np.dot(box_2, constant_martix)[..., 0]
result[..., 3] = np.dot(box_3, constant_martix)[..., 0]
col = np.tile(np.arange(0, grid_w), grid_w).reshape(-1, grid_w)
row = np.tile(np.arange(0, grid_h).reshape(-1, 1), grid_h)
col = col.reshape(grid_h, grid_w, 1, 1)
row = row.reshape(grid_h, grid_w, 1, 1)
grid = np.concatenate((col, row), axis=-1)
result[..., 0:2] = (0.5 - result[..., 0:2] + grid) / (grid_w, grid_h)
result[..., 2:4] = (0.5 + result[..., 2:4] + grid) / (grid_w, grid_h)
return result, box_class_probs
def filter_boxes(boxes, box_class_probs):
box_classes = np.argmax(box_class_probs, axis=-1)
box_class_scores = np.max(box_class_probs, axis=-1)
pos = np.where(box_class_scores >= OBJ_THRESH)
boxes = boxes[pos]
classes = box_classes[pos]
scores = box_class_scores[pos]
return boxes, classes, scores
def nms_boxes(boxes, scores):
x1 = boxes[:, 0]
y1 = boxes[:, 1]
x2 = boxes[:, 2]
y2 = boxes[:, 3]
areas = (x2 - x1) * (y2 - y1)
order = scores.argsort()[::-1]
keep = []
while order.size > 0:
i = order[0]
keep.append(i)
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
w1 = np.maximum(0.0, xx2 - xx1 + 0.00001)
h1 = np.maximum(0.0, yy2 - yy1 + 0.00001)
inter = w1 * h1
ovr = inter / (areas[i] + areas[order[1:]] - inter)
inds = np.where(ovr <= NMS_THRESH)[0]
order = order[inds + 1]
keep = np.array(keep)
return keep
def yolov3_post_process(input_data):
boxes, classes, scores = [], [], []
for i in range(3):
result, confidence = process(input_data[i])
b, c, s = filter_boxes(result, confidence)
boxes.append(b)
classes.append(c)
scores.append(s)
boxes = np.concatenate(boxes)
classes = np.concatenate(classes)
scores = np.concatenate(scores)
nboxes, nclasses, nscores = [], [], []
for c in set(classes):
inds = np.where(classes == c)
b = boxes[inds]
c = classes[inds]
s = scores[inds]
keep = nms_boxes(b, s)
nboxes.append(b[keep])
nclasses.append(c[keep])
nscores.append(s[keep])
if not nclasses and not nscores:
return None, None, None
boxes = np.concatenate(nboxes)
classes = np.concatenate(nclasses)
scores = np.concatenate(nscores)
return boxes, scores, classes
def draw(image, boxes, scores, classes):
for box, score, cl in zip(boxes, scores, classes):
x1, y1, x2, y2 = box
print('class: {}, score: {}'.format(CLASSES[cl], score))
print('box coordinate left,top,right,down: [{}, {}, {}, {}]'.format(x1, y1, x2, y2))
x1 *= image.shape[1]
y1 *= image.shape[0]
x2 *= image.shape[1]
y2 *= image.shape[0]
left = max(0, np.floor(x1 + 0.5).astype(int))
top = max(0, np.floor(y1 + 0.5).astype(int))
right = min(image.shape[1], np.floor(x2 + 0.5).astype(int))
bottom = min(image.shape[0], np.floor(y2 + 0.5).astype(int))
cv.rectangle(image, (left, top), (right, bottom), (255, 0, 0), 2)
cv.putText(image, '{0} {1:.2f}'.format(CLASSES[cl], score),
(left, top - 6),
cv.FONT_HERSHEY_SIMPLEX,
0.6, (0, 0, 255), 2)
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument("--library", help="Path to C static library file")
parser.add_argument("--model", help="Path to nbg file")
parser.add_argument("--picture", help="Path to input picture")
parser.add_argument("--level", help="Information printer level: 0/1/2")
args = parser.parse_args()
if args.model :
if os.path.exists(args.model) == False:
sys.exit('Model \'{}\' not exist'.format(args.model))
model = args.model
else :
sys.exit("NBG file not found !!! Please use format: --model")
if args.picture :
if os.path.exists(args.picture) == False:
sys.exit('Input picture \'{}\' not exist'.format(args.picture))
picture = args.picture
else :
sys.exit("Input picture not found !!! Please use format: --picture")
if args.library :
if os.path.exists(args.library) == False:
sys.exit('C static library \'{}\' not exist'.format(args.library))
library = args.library
else :
sys.exit("C static library not found !!! Please use format: --library")
if args.level == '1' or args.level == '2' :
level = int(args.level)
else :
level = 0
yolov3 = KSNN('VIM3')
print(' |---+ KSNN Version: {} +---| '.format(yolov3.get_nn_version()))
print('Start init neural network ...')
yolov3.nn_init(library=library, model=model, level=level)
print('Done.')
print('Get input data ...')
cv_img = list()
orig_img = cv.imread(picture, cv.IMREAD_COLOR)
img = cv.resize(orig_img, (640, 640)).astype(np.float32)
img[:, :, 0] = img[:, :, 0] - mean[0]
img[:, :, 1] = img[:, :, 1] - mean[1]
img[:, :, 2] = img[:, :, 2] - mean[2]
img = img / var[0]
img = img.transpose(2, 0, 1)
#img = cv.cvtColor(img, cv.COLOR_BGR2RGB)
cv_img.append(img)
print('Done.')
print('Start inference ...')
start = time.time()
'''
default input_tensor is 1
'''
data = yolov3.nn_inference(cv_img, platform='ONNX', reorder='2 1 0', output_tensor=3, output_format=output_format.OUT_FORMAT_FLOAT32)
end = time.time()
print('Done. inference time: ', end - start)
input0_data = data[2]
input1_data = data[1]
input2_data = data[0]
input0_data = input0_data.reshape(SPAN, LISTSIZE, GRID0, GRID0)
input1_data = input1_data.reshape(SPAN, LISTSIZE, GRID1, GRID1)
input2_data = input2_data.reshape(SPAN, LISTSIZE, GRID2, GRID2)
input_data = list()
input_data.append(np.transpose(input0_data, (2, 3, 0, 1)))
input_data.append(np.transpose(input1_data, (2, 3, 0, 1)))
input_data.append(np.transpose(input2_data, (2, 3, 0, 1)))
boxes, scores, classes = yolov3_post_process(input_data)
if boxes is not None:
draw(orig_img, boxes, scores, classes)
cv.imwrite("./result.jpg", orig_img)
cv.imshow("results", orig_img)
cv.waitKey(0)
这是用ksnn1.4推理的终端结果

这是利用ksnn1.3推理的终端结果
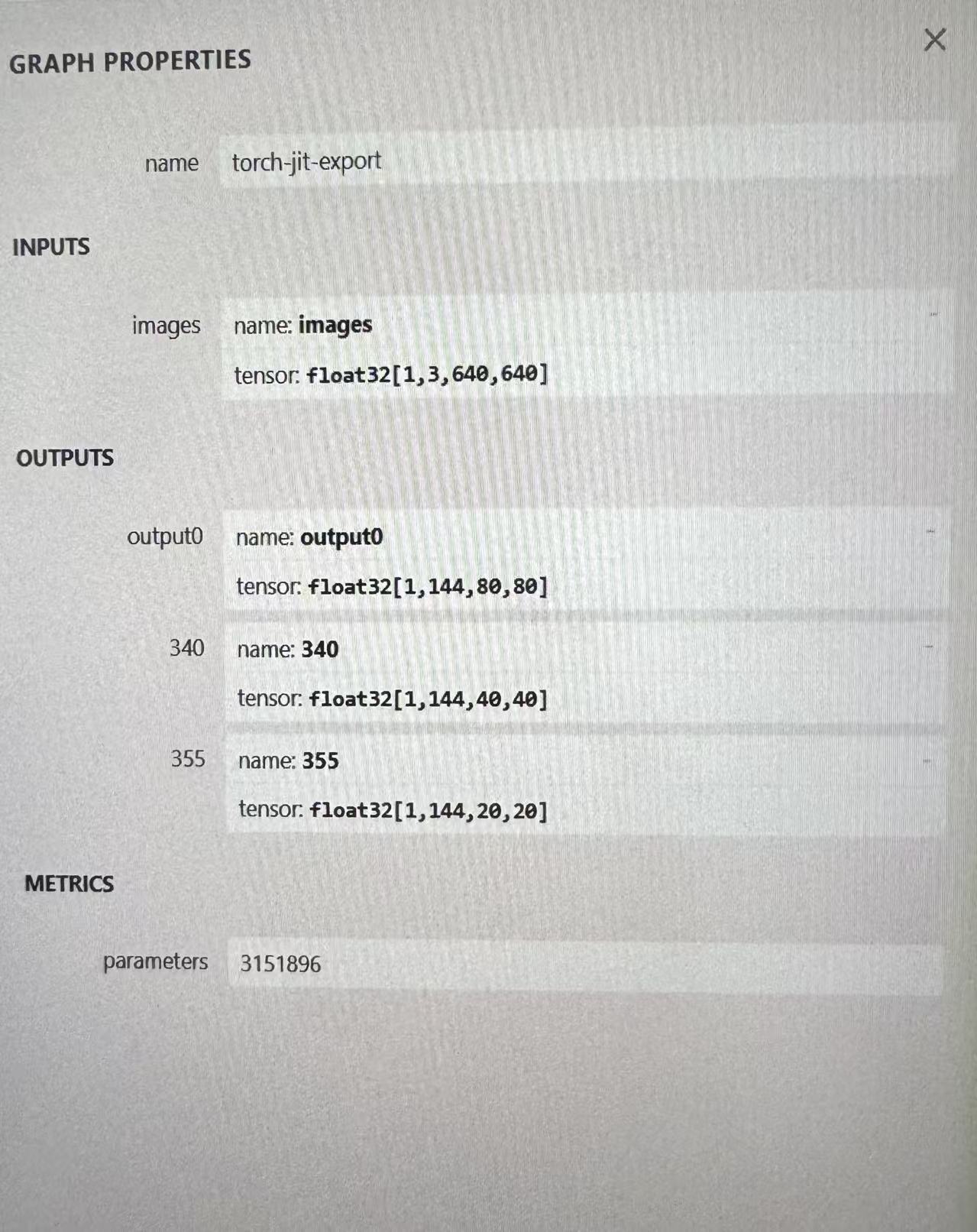
另外附上自定义的yolov8n.onnx的netron输出图
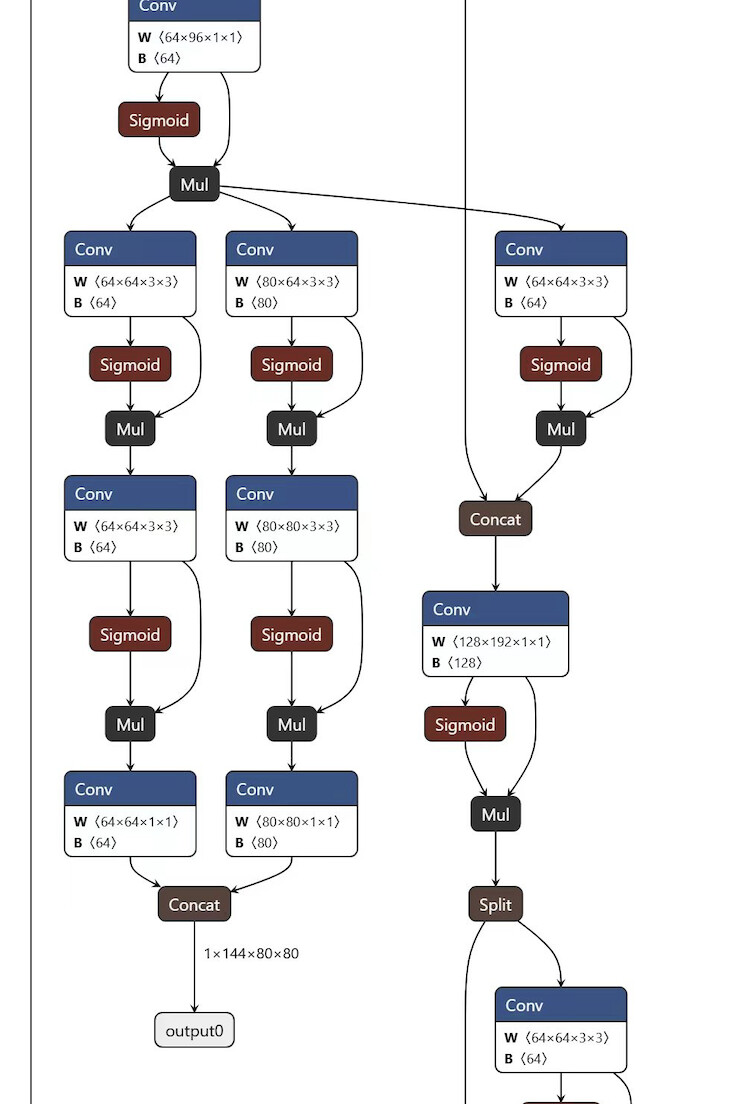
以及我的output