Hi everybody!
This topic raised to describe and showcase my DIY project I built for my ATV.
I’m really big fan of an extreme outdoor sports, like riding ATV’s and snowmobiles and some day in a past - asked myself if I could build something useful for that purpose. And after looking what is on a market - i was a bit disappointed that there are not much things there and if it is - it costs too mush $$ and often misses functionality I would like to have for my ATV/Snowmobile
So decision was made to create a headunit for my Russian ATV RM-800 (which is pretty the same as ODES Assailant v800)

as replacement for original one.

At the beginning I wrote a small to do list with my expectations I’'ve planned to realize in my DIY headunit. So here it is:
1/ It should be no changes be made into the my ATV wiring. So in case of failure - I can easily revert everything back
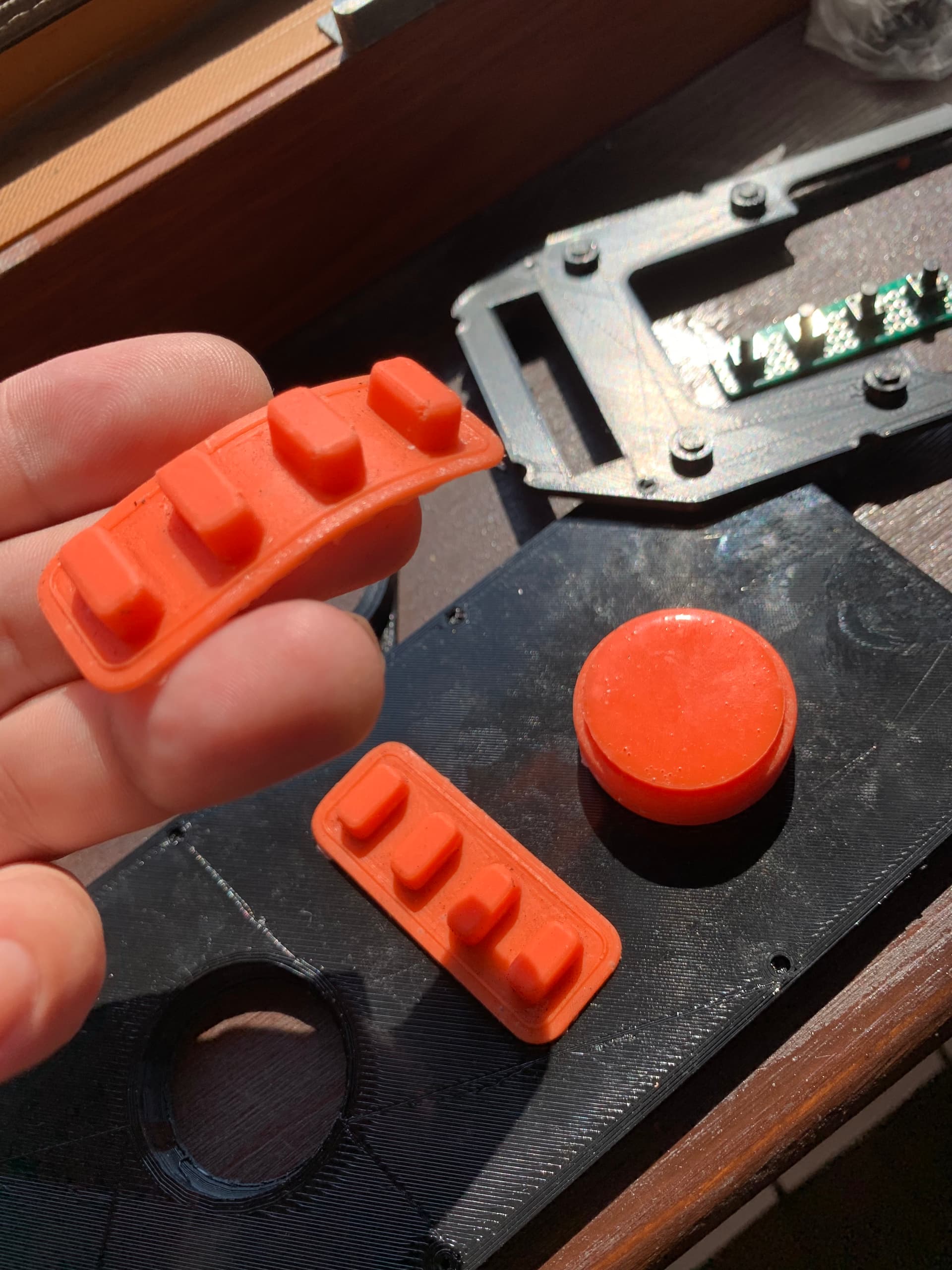
2/ It should be absolutely no changes to the plastic body details of my ATV, so I’ve put everything into the existing headunit body limits
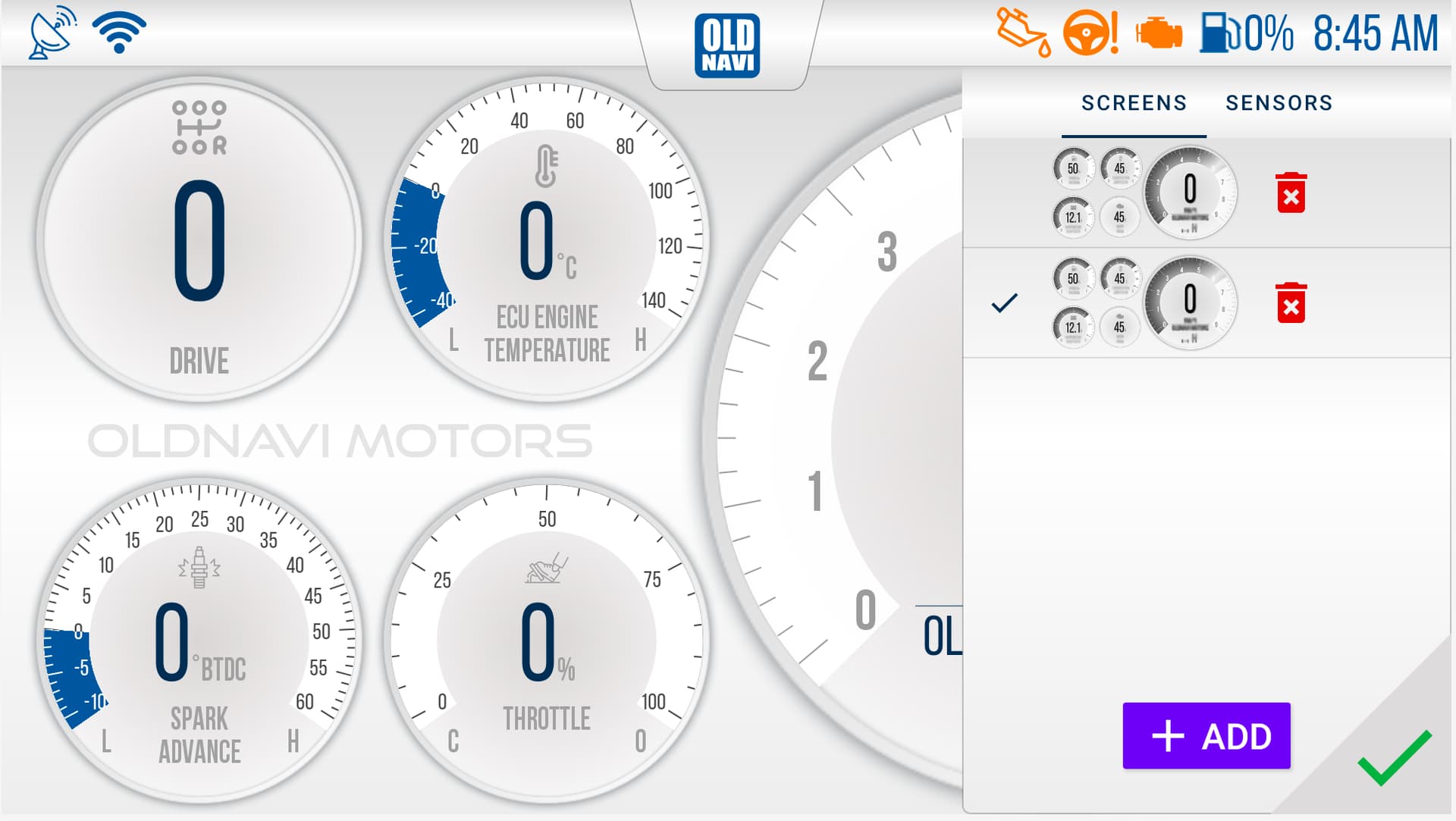
3/ I want to have really nice GUI with modern LCD displays
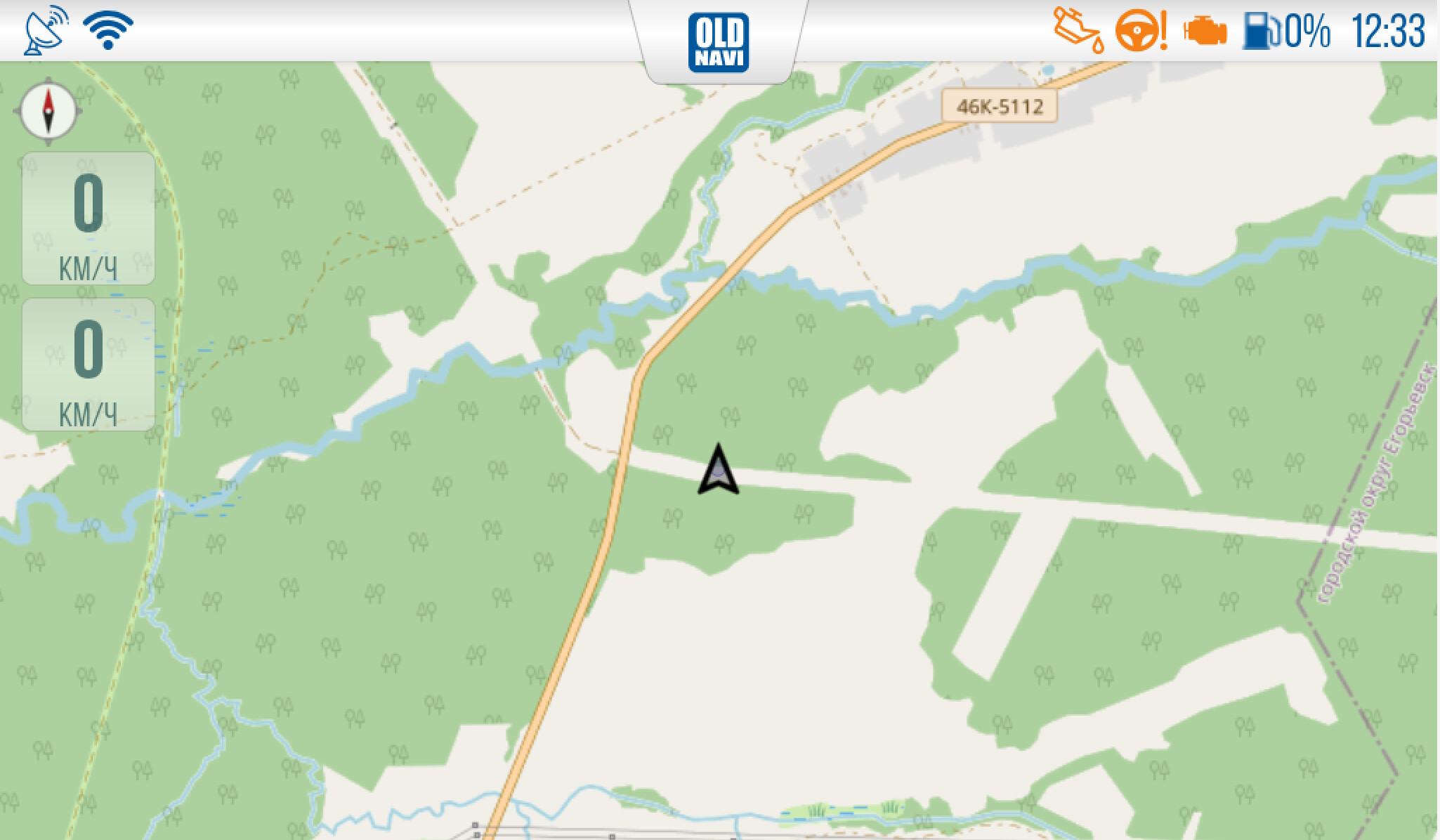
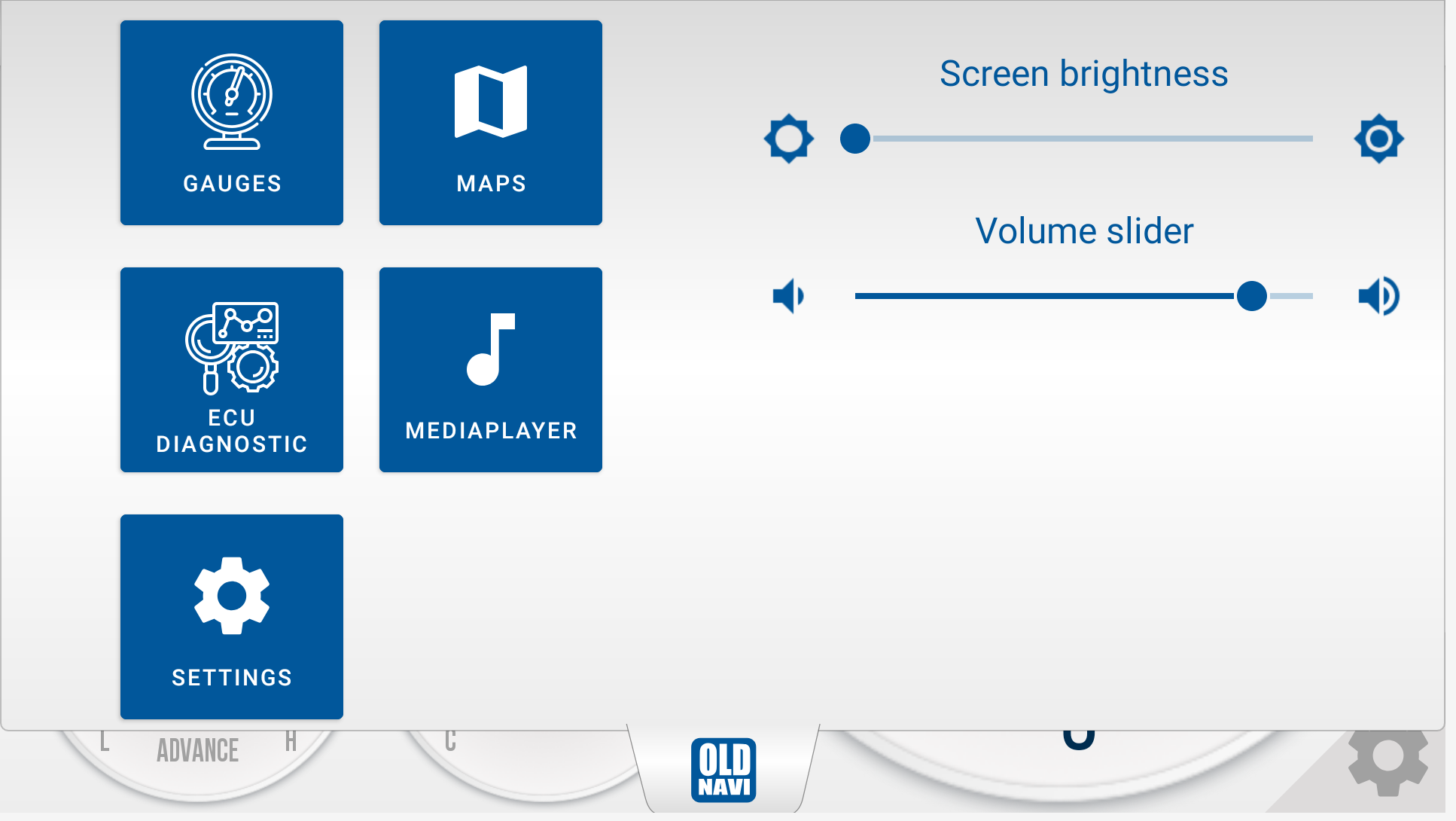
4/ I want to have offline maps for navigation (both raster from satellites and vector maps)
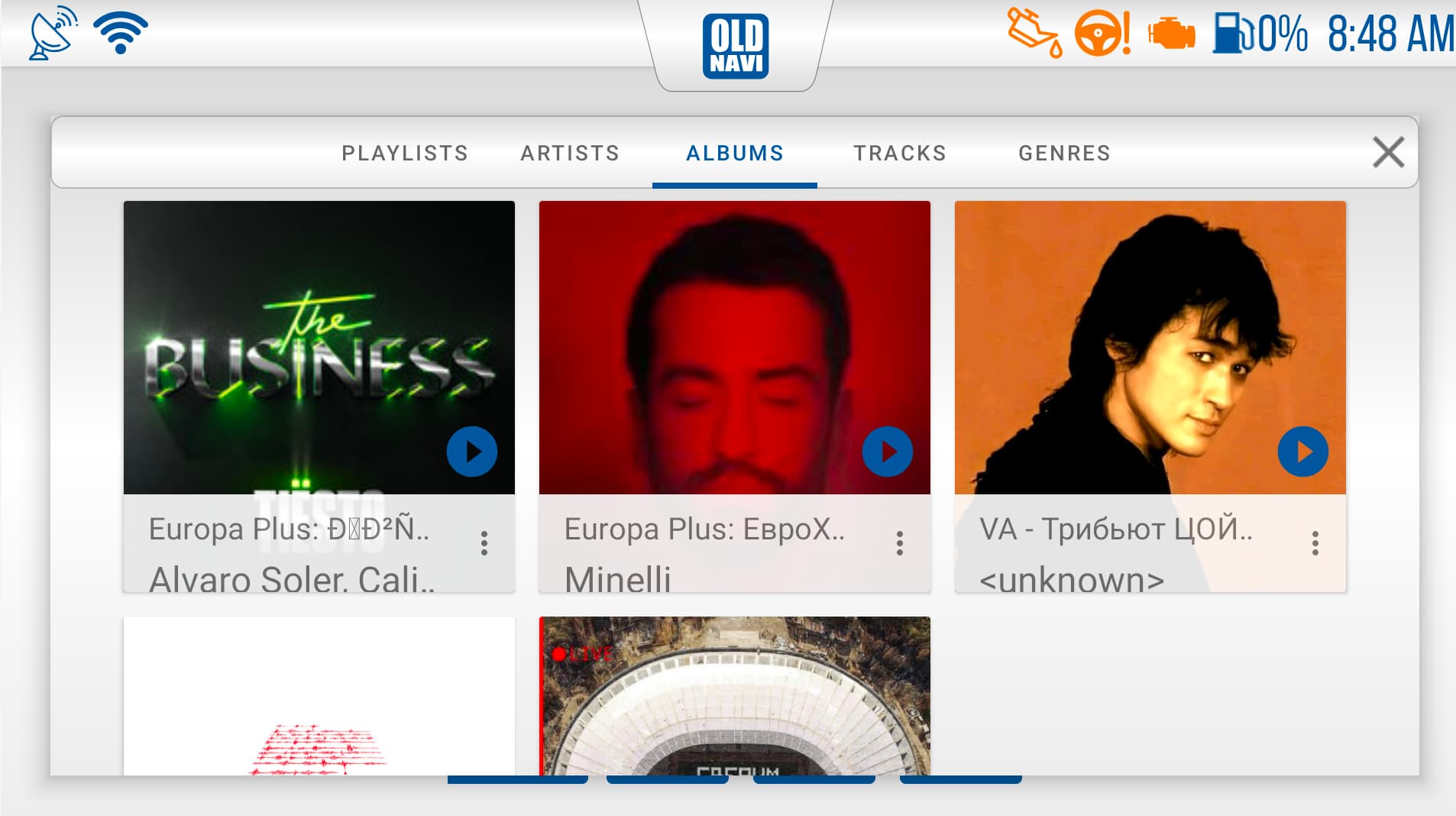
5/ Having some multimedia player would be a nice option too
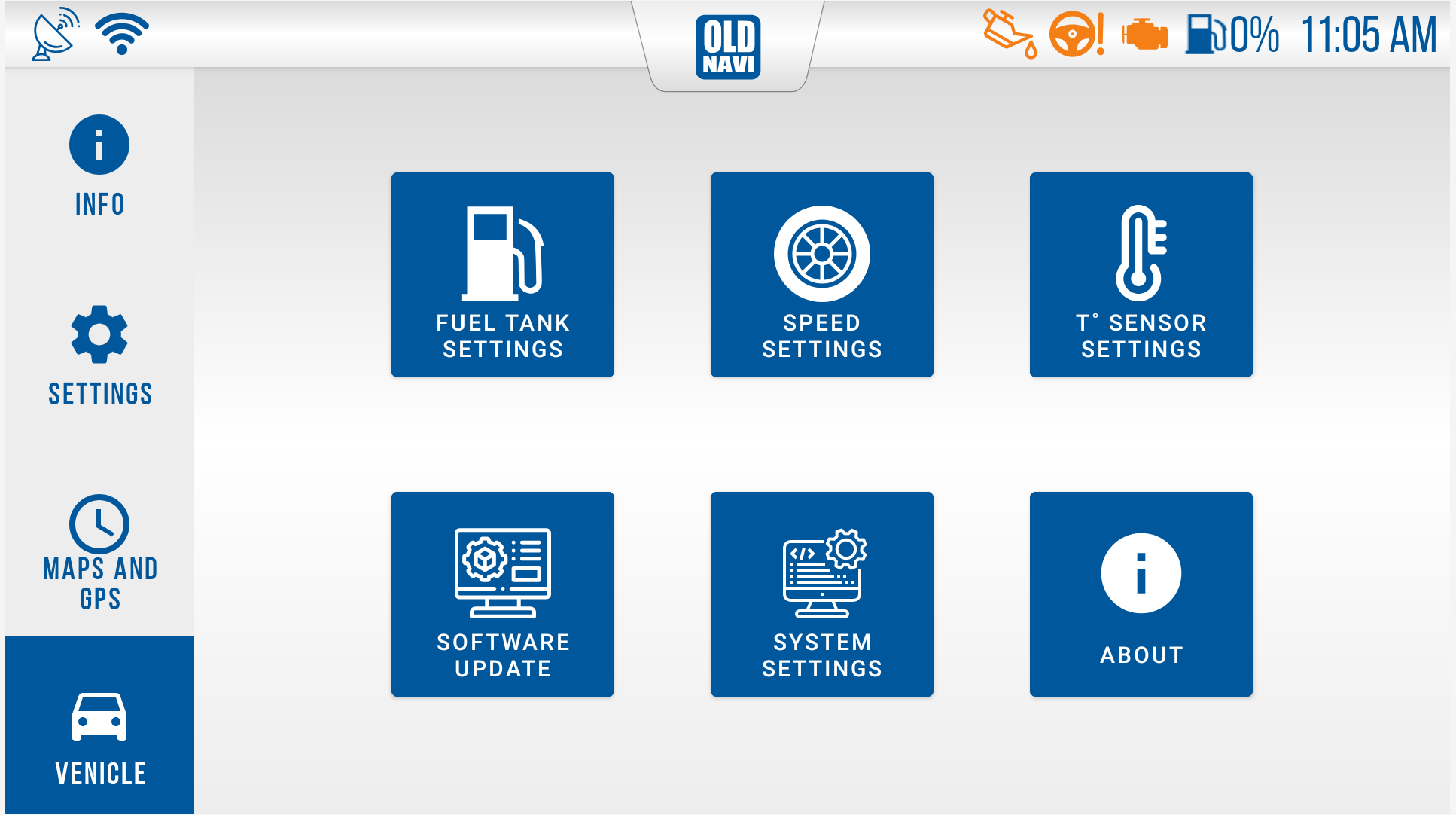
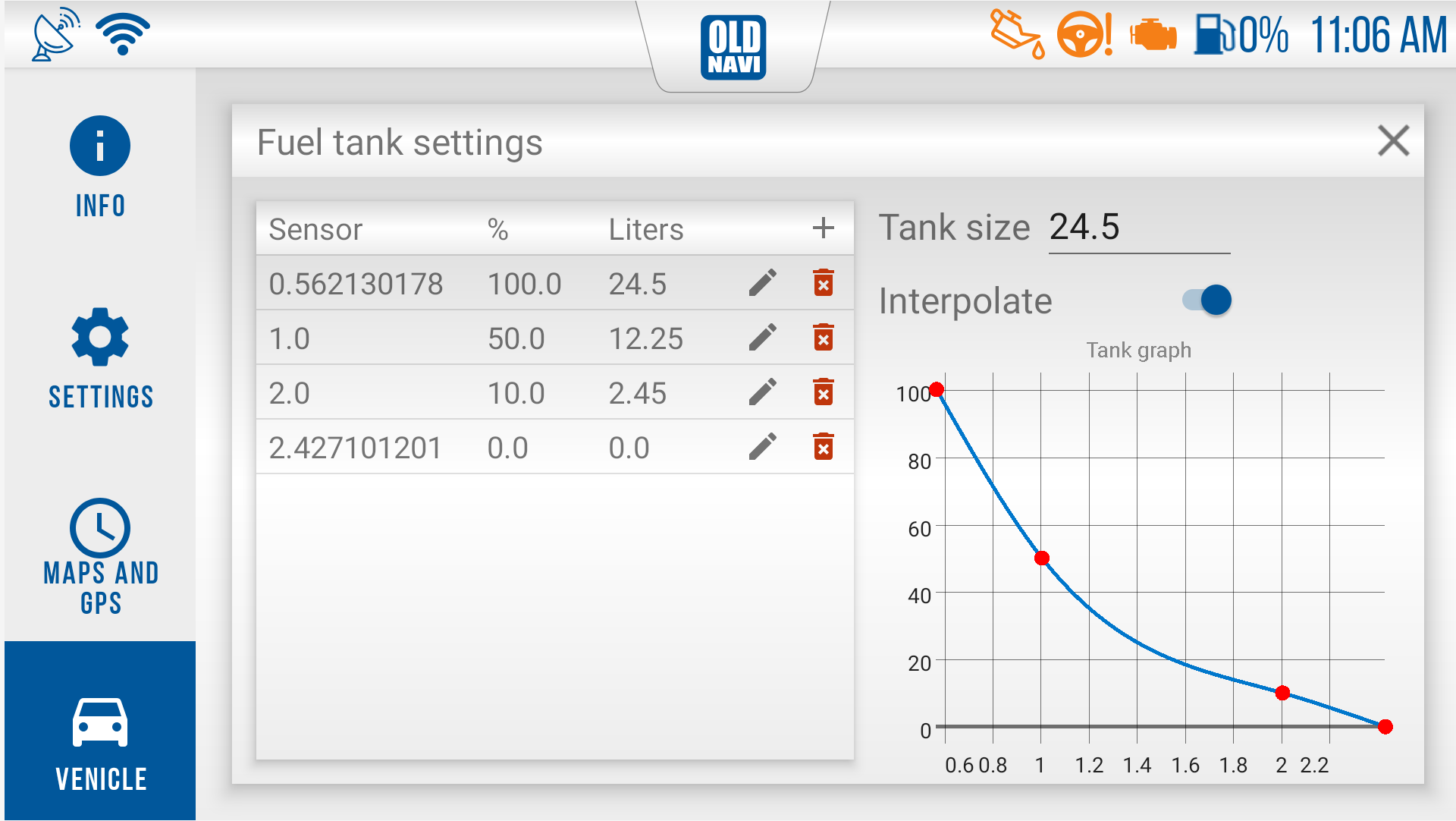
6/ I want everything to be tunable - so I can have an ability to arrange sensors view as I need (tachometer, speedometer, temperature and etc)
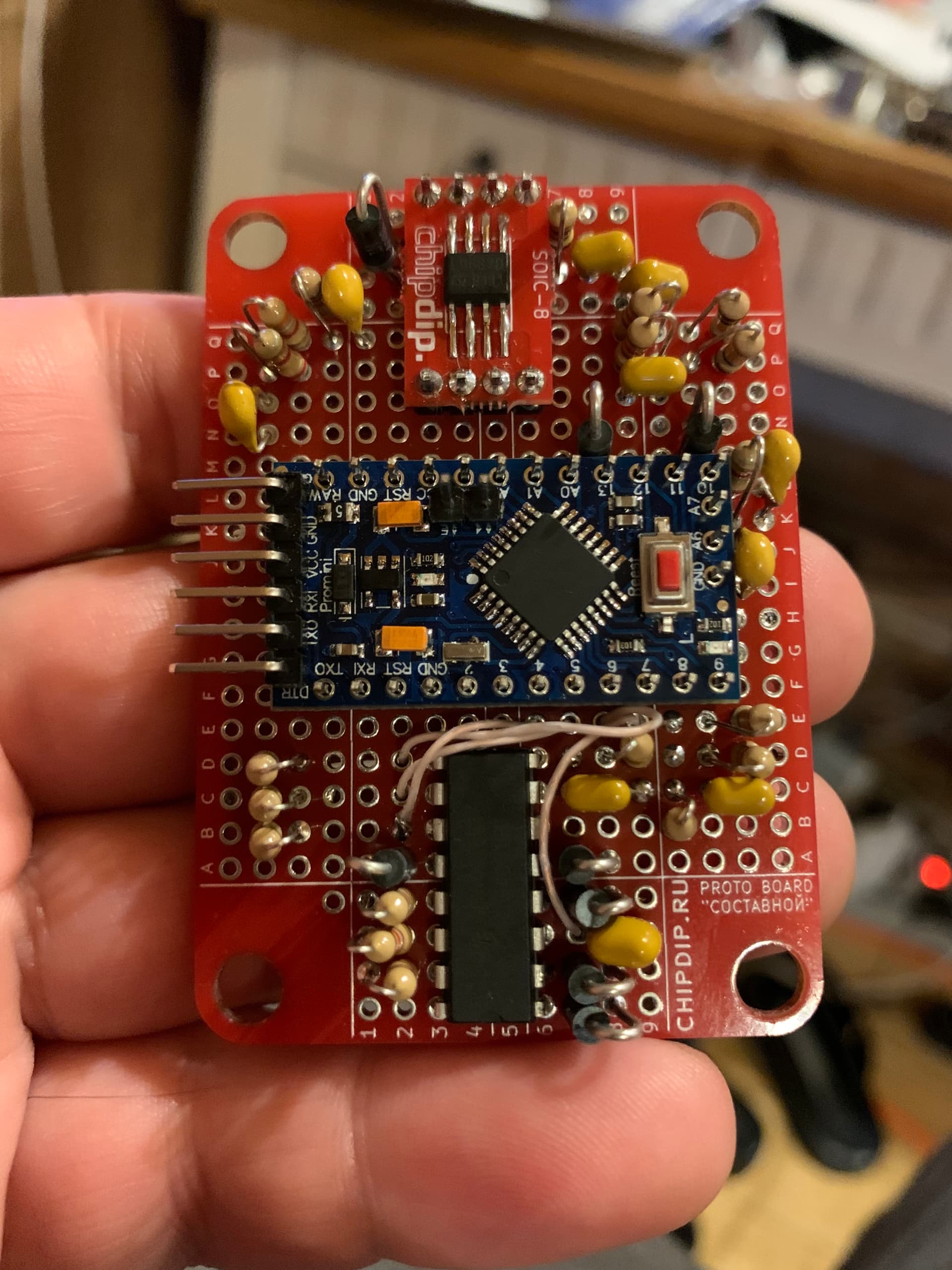
7/ I want my headunit to work with all hardware sensors available on my ATV
8/ I want my headunit to work directly with engine ECU unit, get ECU sensors data, read and flush engine errors and etc.
9/ Experimental features - I want my headunit to share and receive a valuable information (speed, GPS, coordinates, status, nicknames and etc) over Bluetooth BLE broadcast messages. This really cool feature when you’re riding with group of riders - so you always know where everybody are and also even can have “follow-me” lead functionality. There is similar feature available from Polaris - called Polaris Team Ride - but the price is really big (and I don’t have Polaris ATV  )
)
…
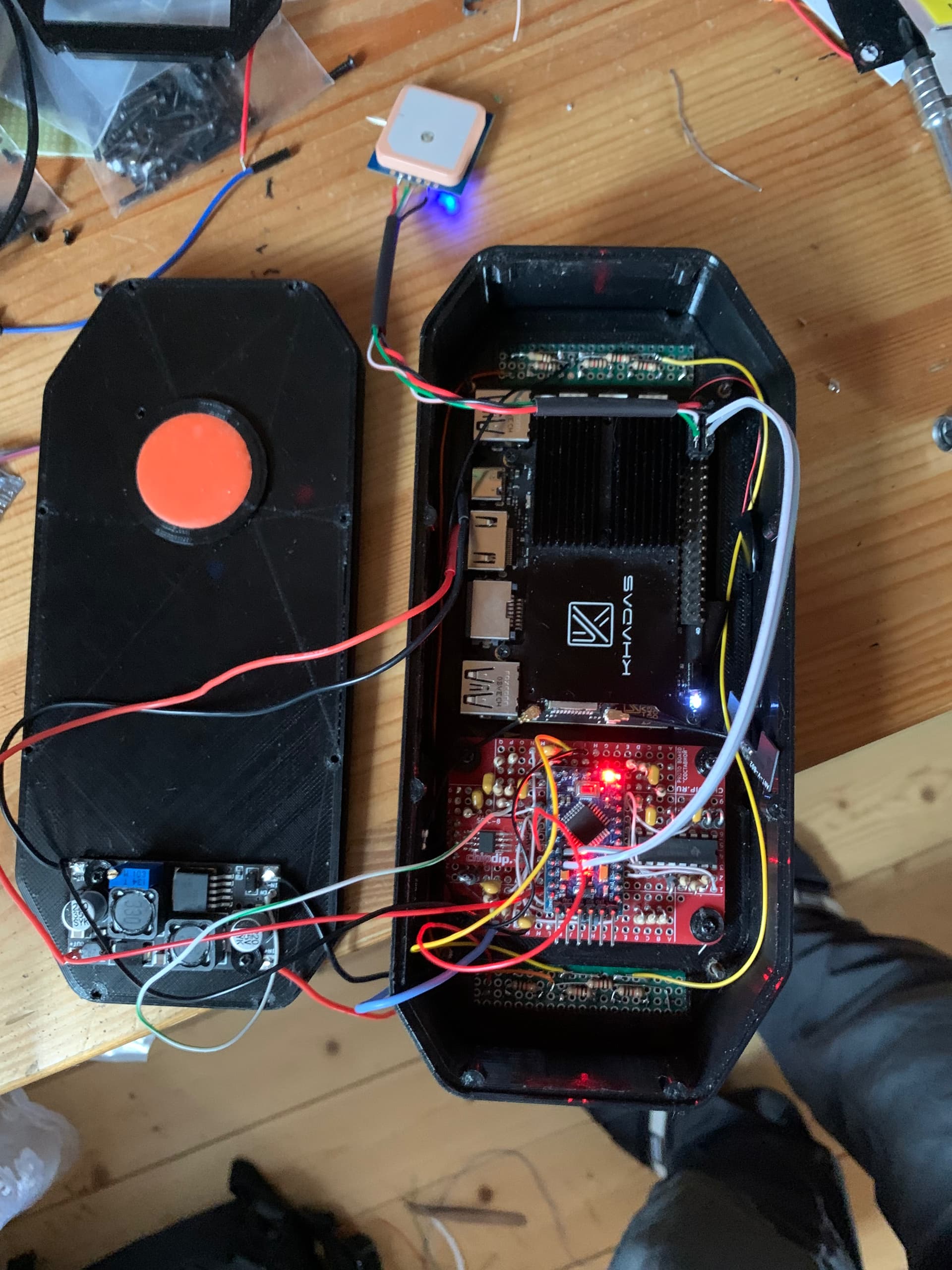
N/. The body of my headunit has to be designed water and mud proof and build using modern 3D printing technique.
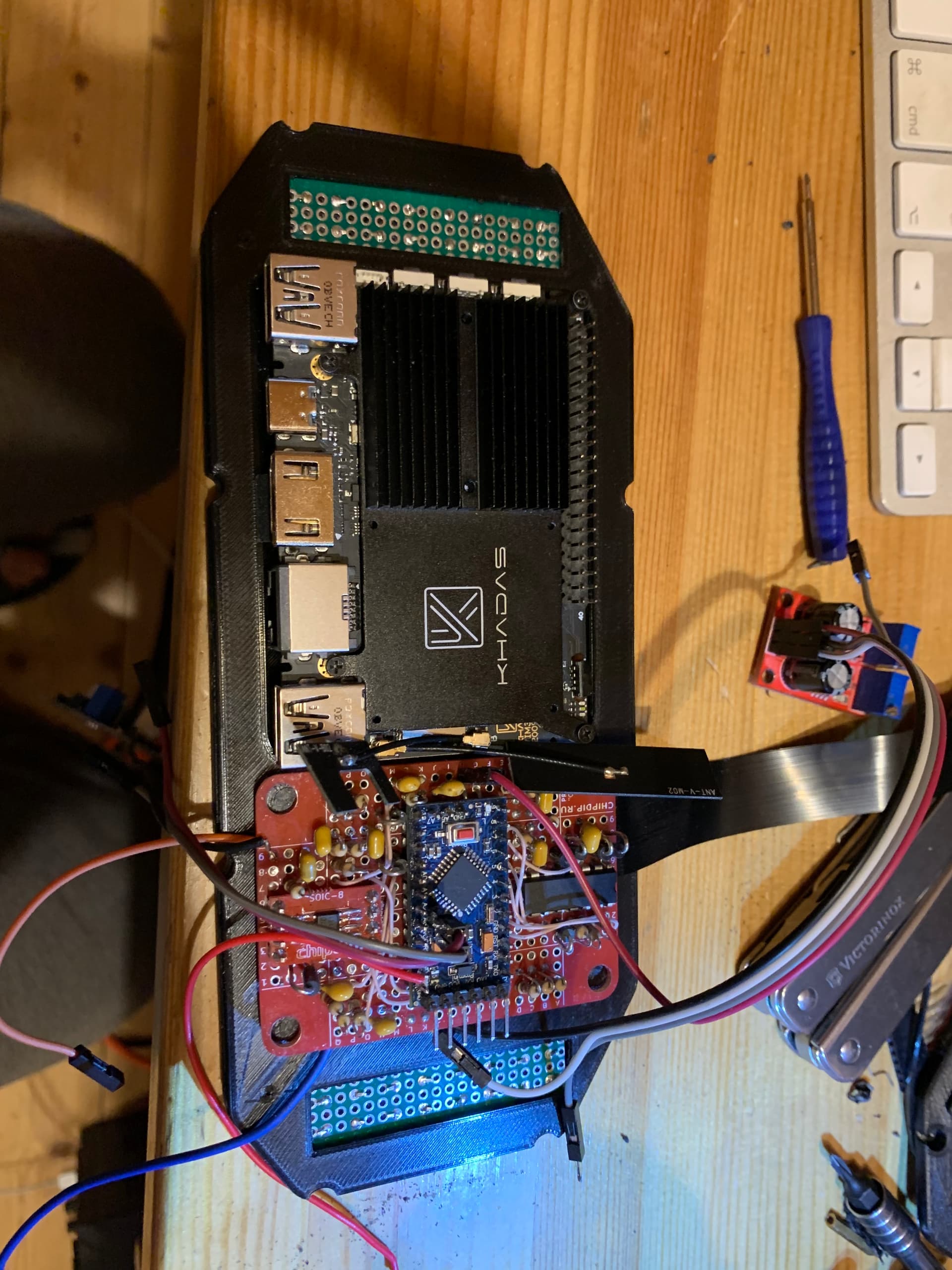
I evaluated many SOC boards for that purposes and found that Khadas VIM3L board seems to be best to fit my requirements as it is more than powerful, very slim design and etc… So I decide to give it a try
Stay tuned… more things to come
PS: This project was already completed and it took around 9 months from idea to final realization. But I will fill this topic with a story of this development journey as there were a lot if interesting findinds/successes/failures during it.