Hello Folks,
We are excited to announce that the Xenomai4 realtime kernel for Ubuntu 24.04 is now available for Edge2. You can install it online using OOWOW.
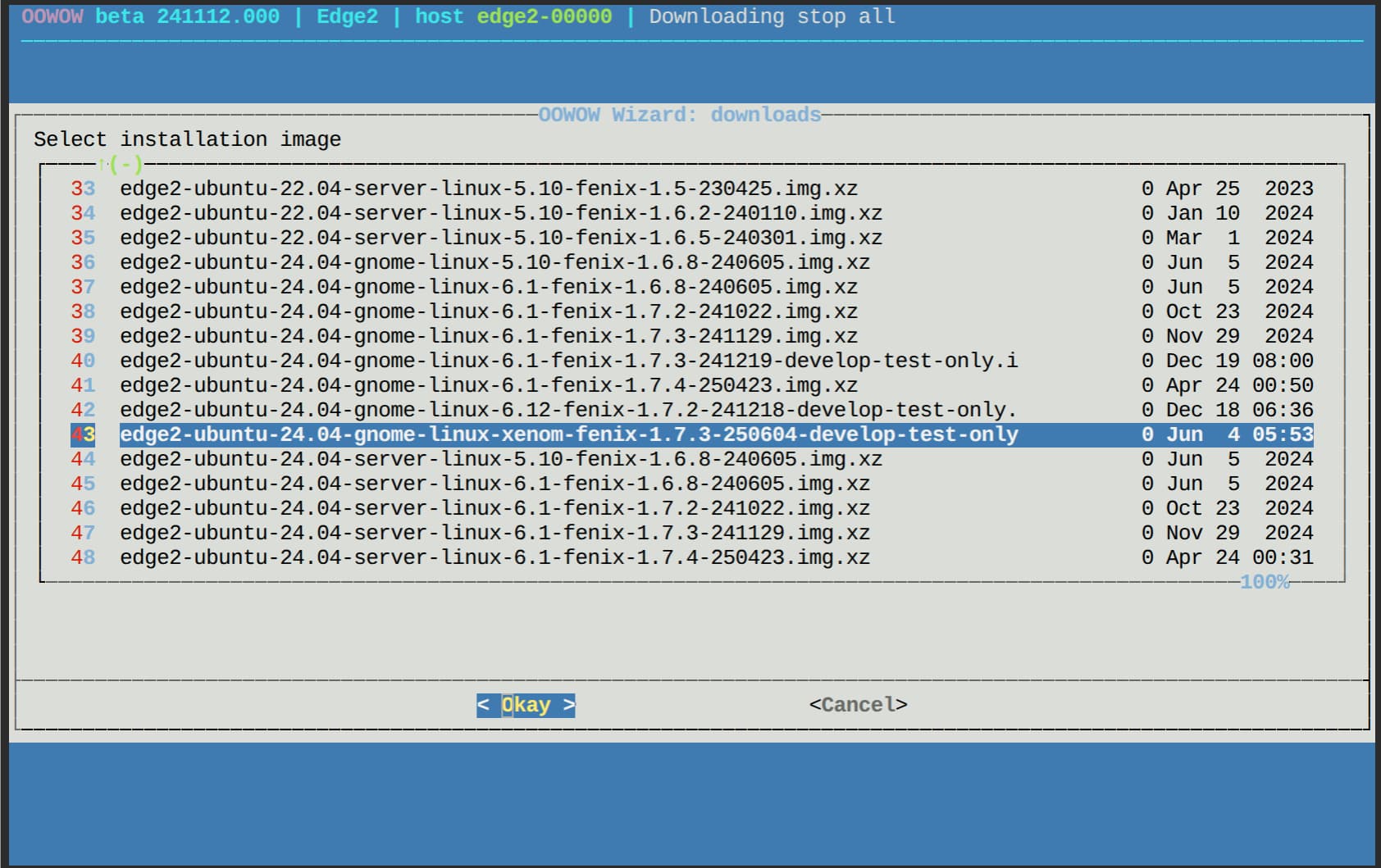
- Edge2:
edge2-ubuntu-24.04-gnome-linux-xenom-fenix-1.7.3-250604-develop-test-only.img.xz
U-Boot Version: 2024.07
NOTE: This is a development test release, not a final version. Please be aware of potential bugs and report any issues you encounter.
We highly encourage your feedback!
Test EVL
Dependencies Installed
Clone repos
cd ~
git clone https://github.com/khadas/linux.git
cd linux/
git checkout khadas-linux-xenomai4-6.12.y
cd ../
git clone https://source.denx.de/Xenomai/xenomai4/libevl.git
We have installed all required packages and Python modules to support EVL kernel development and testing:
sudo apt update
sudo apt install -y \
build-essential meson ninja-build pkg-config libbpf-dev libelf-dev \
libdw-dev libclang-dev clang cmake libnuma-dev python3 python3-pip \
python3-setuptools libcap-dev
pip3 install ninja --break-system-packages
CPU Isolation Configured
To ensure low-latency and deterministic performance for EVL real-time threads, CPUs 4 and 5 have been isolated:
- Modified
/boot/extlinux/extlinux.conf:
APPEND ... isolcpus=4,5 nohz_full=4,5 rcu_nocbs=4,5
- System rebooted to apply changes.
(Optional) Minimum CPU frequency set for real-time cores:
echo 1800000 | sudo tee /sys/devices/system/cpu/cpu4/cpufreq/scaling_min_freq
echo 1800000 | sudo tee /sys/devices/system/cpu/cpu5/cpufreq/scaling_min_freq
EVL Library Compiled and Installed
Compiled EVL from source using Meson and Ninja:
mkdir /tmp/build-native && cd /tmp/build-native
meson setup -Dbuildtype=release -Dprefix=/usr -Duapi=~/linux . ~/libevl
meson compile
sudo ninja install
Functionality Verified
Ran the EVL test suite:
sudo evl test
basic-xbuf: OK
clock-timer-periodic: OK
clone-fork-exec: OK
detach-self: OK
duplicate-element: OK
element-visibility: OK
...
All core tests passed successfully (e.g., monitor-pi, poll-xbuf, sched-tp-accuracy, etc.).
Real-Time Context Switch Stress Test (hectic)
Executed the hectic tool to validate context switching and FPU management under stress:
sudo hectic -s 200
- Threads successfully spawned across isolated CPUs.
- FPU test routines passed.
- Real-time scheduling results were observed and validated.
Real-Time Performance Test on Edge2 with Xenomai4
Platform: Khadas Edge2
Kernel: 6.12.19+ PREEMPT EVL
libevl version: evl.0.50 -- #c39165f
Test Duration: 3 hours continuous
CPU Affinity: CPU5 (isolated)
Thread Priority: 98
Sampling Period: 1000 µs
Context: User space
System Stress Conditions
To simulate a real-world multitasking scenario, system stress was introduced using the following methods:
Memory and CPU stress:
stress -m 16 -c 16
GPU/Graphics stress:
Launched glmark2-es2-wayland on 4 separate terminals.
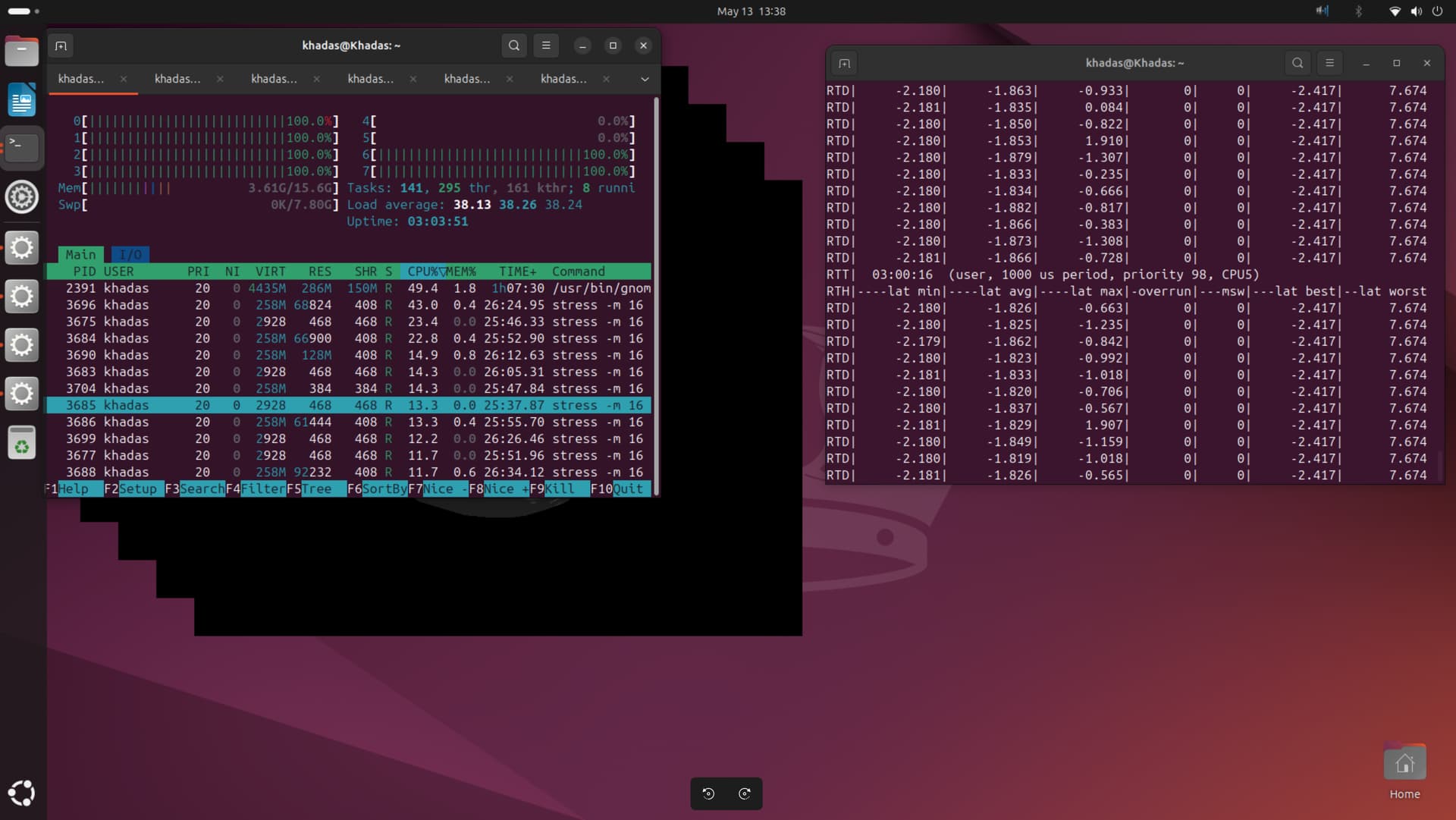
Latency Results (from evl-latency)
| Metric | Value |
|---|---|
| Min latency | -2.417 µs |
| Avg latency | -1.845 µs |
| Max latency | 7.674 µs |
| Total samples | 10,828,298 |
| Peak load time | 02:17:09 |
| Total test duration | 03:00:29 |
Observation: Under full system load (CPU, memory, GPU), the real-time EVL thread on CPU5 maintained an impressively low maximum latency of just 7.674 microseconds.
Self build
In fenix , replace the Linux branch as following shows:
diff --git a/config/boards/Edge2.conf b/config/boards/Edge2.conf
index a0680292..0550845b 100644
--- a/config/boards/Edge2.conf
+++ b/config/boards/Edge2.conf
@@ -96,7 +96,7 @@ case "$LINUX" in
[ "$LINUX_VENDOR_DIR" ] && \
LINUX_DIR=$(realpath "$LINUX_VENDOR_DIR")
LINUX_DTB="$LINUX_DIR/arch/arm64/boot/dts/rockchip/rk3588s-khadas-edge2.dtb"
- LINUX_GIT_BRANCH="khadas-linux-6.12.y"
+ LINUX_GIT_BRANCH="khadas-linux-xenomai4-6.12.y"
LINUX_DEFCONFIG="${LINUX_DEFCONFIG:-kedges_defconfig}"
SERIALCON="ttyS2"
BOOT_SCRIPT_BOARD=""
Then build Edge2 mainline image.