Тем более не вопрос. Можете его редактировать, готовить DTB и компоновать прошивку с пом mkbootimg из андроид тулов.
Так я его и редактирую, в нем указана ссылка на имя разрешения и все, а все разрешения и добавляются в драйвер HDMI ядра. По это я сразу и написал в самом начале.
Но вы стали говорить что делается это не так.
Ну простите. Я подумал, что вам не хочется компилять ядро и начал рассказывать о параметрах. А то, что вам нужны те разрешения, что не представлены в OSD и HDMI драйверах, я сразу не сообразил, так как первая цифра была 480!
1 Like
Ядро компильнуть это не трудно, но вот тайминги подобрать правильные, вот тут большая проблемма, при каждом изменении любого параметра приходится пересобирать ядро, шить плату, включать андроид и смотреть не рябит ли дисплей. И вот на это тратится время днями, а первый раз я разрешение вообще неделю подбирал.

Что означает параметр “тайминг” ?
Разрешение в настройках и исходниках - видел, частоту - видел. Тайминг не встречал (возможно не обращал внимания).
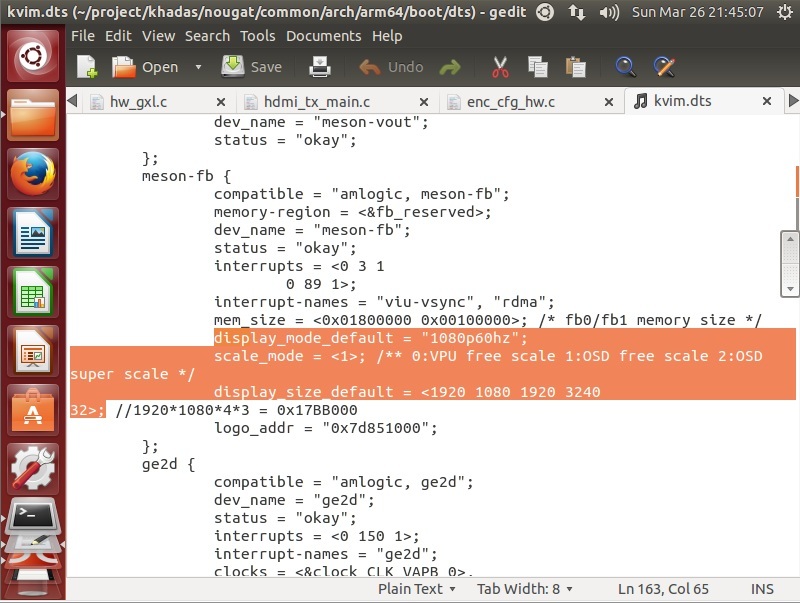
в драйвере HDMI, внутри структуры, параметры .timing = {
static struct hdmi_format_para fmt_para_1920x1080p60_16x9 = {
.vic = HDMI_1920x1080p60_16x9,
.name = “1920x1080p60hz”,
.sname = “1080p60hz”,
.pixel_repetition_factor = 0,
.progress_mode = 1,
.scrambler_en = 0,
.tmds_clk_div40 = 0,
.tmds_clk = 148500,
.timing = {
.pixel_freq = 148500,
.h_freq = 67500,
.v_freq = 60000,
.vsync_polarity = 1,
.hsync_polarity = 1,
.h_active = 1920,
.h_total = 2200,
.h_blank = 280,
.h_front = 88,
.h_sync = 44,
.h_back = 148,
.v_active = 1080,
.v_total = 1125,
.v_blank = 45,
.v_front = 4,
.v_sync = 5,
.v_back = 36,
.v_sync_ln = 1,
},
};
Так может вам собрать обычную rootfs и пробовать все на Linux системе подменяя только ядро, а после настройки уже собирать весь Android. Так ведь быстрее будет!
Вот если хотите прошивка ftp://ftp.radix.pro/radix/platform/releases/1.1.633/s9xx-glibc/khadas-vim/
а как залить вот здесь я написал https://radix.pro/devices/khadas-vim/
И играйте на здоровье с ядром, а как будет готово, может и патчи расшарите.
Я только ядро и подменял на предыдущих платах в андроид. На этой еще не пробовал.
Первый раз сталкиваюсь с amlogic (до этого на rockchip все было) и не все понятно как собирается система. По другому идет сборка и структура ядра отличается.
В Вашей теме по CarPC на плате RADXA выложены пользователем VIC26 тайминги под мою матрицу, которые он подбирал, но там как-то меньше значений параметров:
name "800x480p@60Hz"
refresh 60
xres 800
yres 480
pixclock 29820000
h_bp 96
h_fp 16
v_bp 13
v_fp 1
h_pw 80
v_pw 3
правда, с даташитом параметры некоторые разнятся довольно сильно
Да, остальные параметры нужно сосчитать и они часто не сходятся с даташитом, потому что подключение идет не на прямую в матрицу, а через промежуточный контроллер.
Добрый вечер русскоязычному сообществу.
С недавних пор являюсь обладателем данного девайса. Тоже возникла необходимость добавить кастомные разрешения (система Android). А именно интересуют 800x480 и 1280x600. Кто-либо добился положительных результатов в этом?
Правильно ли я понимаю, что можно сначала подобрать необходимые значения через fbset, а потом уже вносить изменения в ядро для перманентного их добавления? Через wm size чего то адекватного добиться не удалось.
На счет нестандартных не уверен, но со стандартными можно однозначно. Я как-то настраивал все популярные от 640 до 1920, правда на ядре 3.10 для S805. В общем надо экспериментировать.
Дубль ответа на эти воспросы.
Все изменения для VIM делаются в boot.ini с учётом имеющихся переменных в u-boot (открывайте консоль UART и выполняйте команду “printenv”). Учтите, VIM не равно Odroid C2, это разные системы и разные принципы лежат в основе. Вы можете создать свой boot.ini с чистого листа. Зачем вам понадобилось писать свои параметры в u-boot ? Тут есть гораздо более безопасный способ. Использовать внешние скрипты - boot.ini (текстовый , обычный файл) или активировать мультизагрузку и использовать s905_autoscript (бинарный файл, который собирается из текстового). Сделать полную резервную копию на VIM легче лёгкого. Можете использовать утилиту dd. Выполните команду “fdisk -l” и станет понятно, что указывать в качестве аргумента “if=”. А для упрощения всех манипуляций по резервному копированию и последующему (если понадобиться) восстановлению, весьма рекоменду использовать готовы образ Armbian со встроенными для этого утилитами (ddbr).
Зачем свои параметры в uboot?
Миллиард причин, как оказалось. И на vim мне еще предстоит на них налететь, я так чувствую.
Например -
setenv usbmulticam “true”
Без этого usb otg выдавал тонну ошибок при подключении нескольких usb устройств
dwc_otg.fiq_fix_enable=1 coherent_pool=4M dwc_otg.dma_enable=1 dwc_otg.dma_burst_size=256 dwc_otg.nak_holdoff_enable=1 dwc_otg.microframe_schedule=1 dwc_otg.lpm_enable=0
Это все для работы usb
без coherent_pool=4M, например - больше 3 подключенных usb устройств просто не работали.
ну и serialno=${fbt_id#} - позволял получить уникальный серийный номер устройства чтобы можно было отличить программно одно устройство от другого
и это я еще не дошел до шифрования…
Насчет бекапа. Я вставлял emmc от одроида себе в компьютер и делал бекап с помощью dd
Ну и если что-то слетало - восстанавливал разными способами - и монтировал разделы и перенакатывал заново
А в vim - как это сделать? Вот убился uboot партишн у меня в vim после треклятого fw_setenv.
Мне бы только этот раздел перезаписать и все - все бы работало. Но нет.
Господа из khadas сказали замкнуть пин и накатить образ заново. Других вариантов мне не предложили.
Проблема как раз не в том как сделать образ диска - это то ладно. А как на мертвый vim на emmc его потом накатить ежели что.
Я сейчас даже чтобы образ накатить на VIM запускаю под маком VM с виндой и там их китайский программатор какой-то. По мне так это как-то не по-людски.
Все Ваши задачи легко решаются.
Для работы с резервными копиями можно вообще обойтись без ПК. Создать полную или частичную копию, быстро откатиться до заданного состояния или восстановить из полностью убитого состояния, всё это легко выполнить используя готовые образы Armbian. В них есть всё необходимое для этого. На выбор - серверные (консольные) образы или с графикой. Я рекомендую использовать десктопные варианты, в них можно не только работать с копиями, но и иметь браузер (что-бы быстро искать нужную инфу при проблемах с VIM), легко перемещать данные по сети (хранить наборы резервных копии на внешнем ресурсе), работать с разными SDK и много чего еще.
Для использования Armbian. Скачать, распаковать, записать на SD карту. Для обычной работы с Armbian можно использовать USB, но Вам же нужна возможность восстановлия (запуска) системы при убитом u-boot, поэтому нужна SD карта, т.к. по умолчанию чипы S905X поддерживают загрузку u-boot с eMMC или SD карты. Активировали мультизагрузку или использовать boot.ini. Запустили систему. Сразу сделали полную резервную копию утилитой ddbr (она позволяет делать сжатую и “чистую” копии). Для изучения и контроля можно сразу сделать снимок всех текущих параметров из u-boot утилитой fw_printenv, параметры можно изменить утилитой fw_setenv. Но я не рекомендую без проверки сразу писать в u-boot. С начала все изменения тестируются через скрипты boot.ini или s905_autoscript, и только после того, как всё точно проверено и нет проблем, с осторожностью пишем в u-boot. Если в ходе экспериментов убили систему, подключаем SD карту, загружаемся с неё и восстанавливаем. В зависимости от состояния “убитости” системы, изменяются необходимые шаги, для самого критичного случая (когда u-boot полностью не рабочий) есть M-регистр. Если его замкнуть, то система принудительно будет использовать загрузчик с SD карты (он входит в состав всех образов Armbian).
П.С.
Если бы Вы не бросились сразу всё курочить, а потратили не много времени на изучение особенностей VIM и имеющихся для него инструментов, Вы могли бы сэкономить кучу времени и нервов и не пришлось бы обвинять в своих ошибках производителя.
На https://www.armbian.com/download/ нет khadas vim.
Мне бы загрузочный диск сделать с ubuntu на SD карте, думаю это уже решило уже множество проблем. Если что не так - грузишься с sd карты и с нее уже восстанавливаешь emmc.
Но я так и не разобрался как это сделать. Качаю ubuntu от khadas из http://docs.khadas.com/basics/FirmwareResources/ - распаковываю - там update.img - но это не образ системы, как я понимаю. То есть, если я его dd if=update.img of=/dev/sdcard сделаю - он не встанет.
А где взять загрузочный образ не понятно.
Кстати… а если сделать с текущего рабочего emmc слепок на sd карту - он же будет с этой sd карты грузиться, если замкнуть контакты?
Ну и с boot.ini пока конечно совсем не понятно - муторно все. Буду вчитываться внимательнее.
На одроиде я вообще не только /boot/boot.ini редактировал если что надо.
Я и собирал под себя ядро, копировал его в /boot/Image и модули соответственно и все - все работало.
Тут же какие-то танцы с бубном нужны опять же чтобы свое ядро поставить.
Не просто…
ps
А производителей я ни в чем не обвиняю. Они молодцы. Отличную систему сделали, лучше всех. Просто вот с софтом какая-то не простая мутотень,
Уважаемый, а форум VIM кто читать будет ? ![]()
и форум Armbian
И тему на 4pda, ссылка на которую есть в первом посте этой темы.
Есть еще такая тема
Ну и общая тема
https://github.com/150balbes/Amlogic_s905/wiki
Это образы исключительно для установки в eMMC. По сути это бинарные образы с преднастройками для заливки в eMMC через стандартные инструменты Amlogic.
Нет, не будет, это совершенно разные струткуры данных (и возможность обращения к ним) и разные загрузчики.
[quote=“kkkkk, post:57, topic:353”]
Ну и с boot.ini пока конечно совсем не понятно
[/quote]А что там не понятного, обычный сценарий с параметрами и командами для u-boot.
[quote=“kkkkk, post:57, topic:353”]
Я и собирал под себя ядро, копировал его в /boot/Image и модули соответственно и все - все работало.
[/quote]Дык собирайте своё и используйте на VIM. Только чётко понимайте (изучите), как это делать для внешних носителей и как делать для внутренней памяти.
[quote=“kkkkk, post:57, topic:353”]
Тут же какие-то танцы с бубном нужны опять же чтобы свое ядро поставить.
Не просто…
[/quote]Не ленитесь читать, читать и еще раз читать. Инфы по всем Вашим вопросам навалом - только успевай использовать. Всё легко и просто … если с начала изучить вопрос и не пользоваться прежними шаблонами от Одроид. VIM - это единая платформа с ТВ боксами, поэтому и подходы к нему точно такие же, а бонусом от этого, всё что есть под ТВ боксы работает на VIM и наоборот.
Доброго дня! Подскажите как подружить Khadas Vim с сенсорной пленкой (для управления мультитач) - перепробовал все прошивки - не работает. Поставщик сенсорных пленок говорит, что нужно прописать драйвера в исходном коде Android и прислал мне ссылку
https://www.sendspace.com/file/hdls8p
Но как это сделать я не знаю.
Напишите @Terry, он является разработчиком Android для Khadas. Лучше это сделать в виде отдельной темы и на английском.
What’s the version of your VIM ROM?
The HID Multitouch was enabled in these ROM. You can try to update VIM ROM and give me some feedback. Thanks!