Which system do you use? Android, Ubuntu, OOWOW or others?
Ubuntu
Which version of system do you use? Please provide the version of the system here:
vim3-ubuntu-20.04-gnome-linux-4.9-fenix-1.4-221229-emmc.img
Please describe your issue below:
I am trying to run YOLOv8n-seg (segmentation) on the Khadas VIM3 using the vim3_npu_applications_lite SDK.
Post a console log of your issue below:
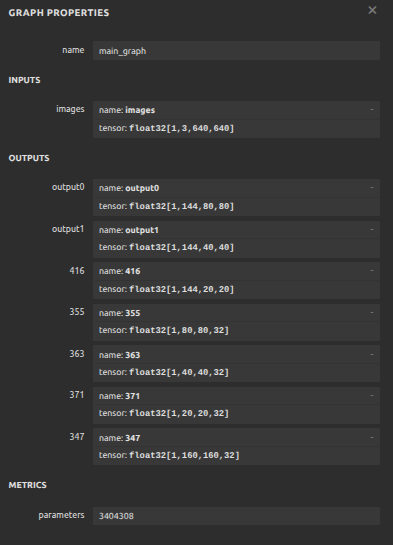
I converted my YOLOv8n-seg model to ONNX and my model outputs the following tensors:
After converting this ONNX file to yolov8n-seg.nb using AML NPU SDK, I replaced:
vnn_yolov8nseg.h
vnn_yolov8nseg.c
yolov8n-seg.nb
inside vim3_npu_applications_lite/yolov8n_seg_demo_x11_usb
I also created and updated:
-
yolov8n_seg_process.c -
main.cpp
to add segmentation post-processing.
The Problem
Even after fixing multiple compilation issues, the demo only shows the camera stream.
There is no segmentation, no masks, and no detections displayed.
I am requesting , To Guide me @numbqq @Louis-Cheng-Liu for building Demo Example of YOLOv8-Segmentation for VIM3 using khadas/vim3_npu_applications_lite
