3) Mechanical Design

Fig4. The body during assembly stage
The design of Humanoid robotics is a combination of both Engineering and Art. All of the parts have to be very lightweight, durable, and easy to manufacture. Furthermore, the final appearance has to look beautiful, and function together as a whole. I was able to craft this body to fit many requirements, and it represents a personal masterpiece of mechanical engineering.
It would be rather simple to make a robot by connecting a bunch of motors together. However, what is difficult is making sure that the robot:
Requirements List
- Has a beautiful outer body that also feels good to hold: The body shape is modeled after an average human female, and most of the body is nice to hold with your hands.
- Has the right strength balance: The torso motors needs to be quite strong, but the motors get weaker as you go to the end of the arm or leg.
- Is fairly low cost: Some gears are used so that 90% of the motors can be fairly low cost motors. Using expensive servo motors everywhere would make it too expensive to sell.
- Has no exposed wiring: Hiding all the wiring is actually quite tricky, as the wire has to hide inside rotation joints.
- Has durable rotation joints: The rotation joints are locked into each other by the plastic shell. The rotation angles also need to be limited to protect from over-rotation.
- Is lightweight but also strong: Any self propelling vehicle has to strike a balance between weight and power in order to work. The robot is quite lightweight at 5kg total given all of its parts/ ability. It’s strength to weight ratio would allow it to walk and crawl, but walking would need a different hips design.
- Is able to be manufactured: The design is able to be 3D printed reliably, but also can be transitioned to injection molding when needed.
- Has simple assembly: The minimum amount of screws are used, and most motors actually just slide into the plastic panels.
- All parts are replaceable: If a part breaks, it can be replaced. Not parts are permanently glued together.
- Does not pinch / hurt the user: All the gears are covered, and all pinch spots are minimized
- Combines soft silicone materials: The soft skin parts have plastic parts inside them to allow attachment to the plastic body.
Here is an overview of the different sections. I will be going over the head sections in more detail as that is where the Khadas Vim3 lives:
Head

Fig 5. Head of Prototype 6.
In the picture above, we can see the prototype 6 head with the Vim3 mounted to the back. This was my first attempt at mounting the vim3 inside the head. It functions alright, but the fan has trouble cooling the Vim3 because it is inside the hair. Thus, it will thermal throttle after some time. Also, the vim3 fan is loud and this disturbed me. The vim3 is connected to USB sound out, sound in, and USB cameras for both eyes. the serial GPIO of the vim3 is used to control the servo motors, which take custom serial commands.
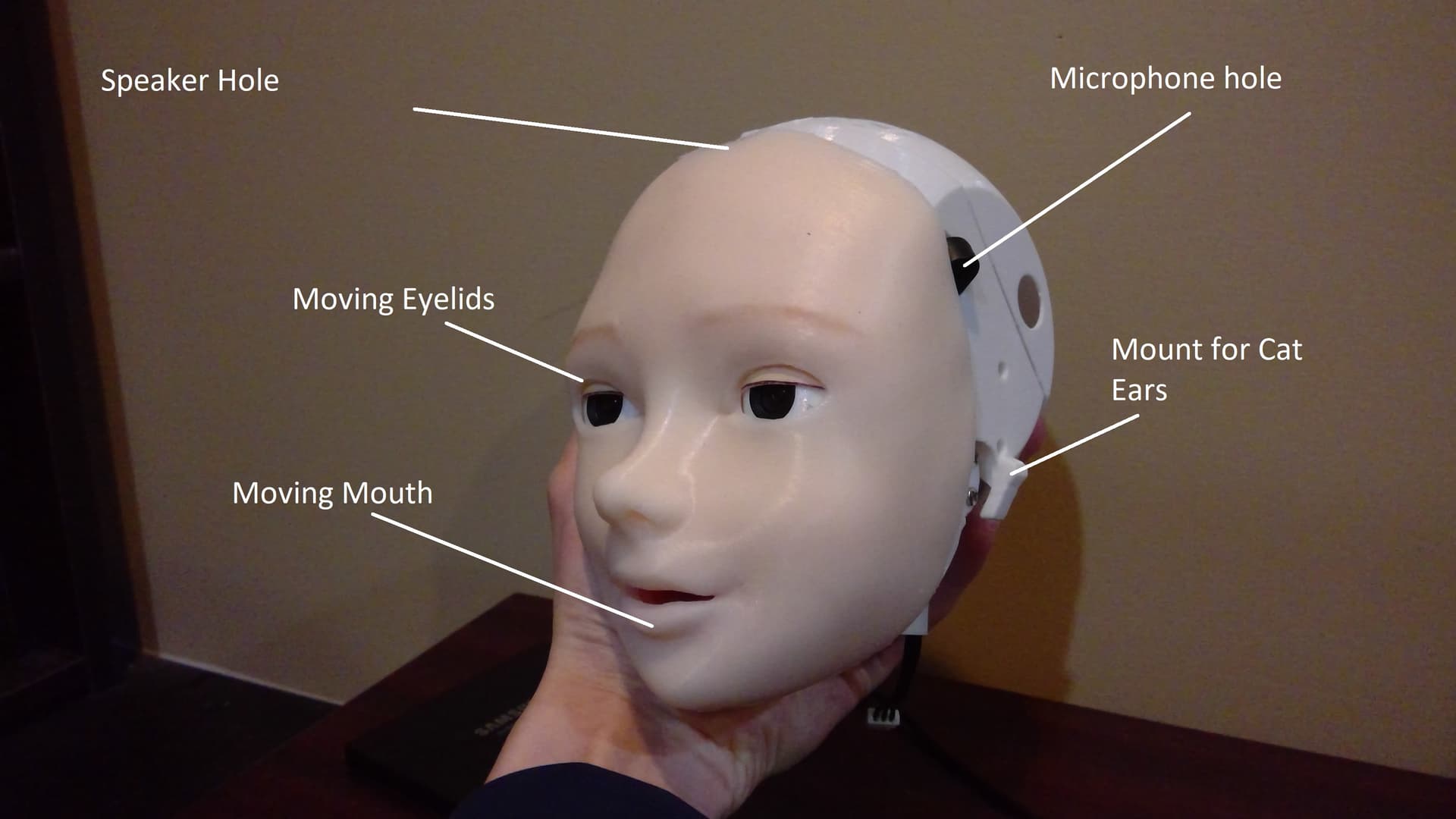
Fig 6. Head of Prototype 7
The head design for prototype 7 is actually my most advanced design. It includes many features such as:
- Moving mouth
- Moving eyelid mechanism
- Top cover that can open up
- Khadas vim3 mounted inside
- Noctua Silent 5V fan cooling system
- Sound system,
- Vision system with really nice synchronized binocular cameras.
Fig 8. Head of Prototype 7 - Internal
Fig9. Top of Head showing Fan duct
Figure 10. CAD model of Head showing the platform for Khadas vim3
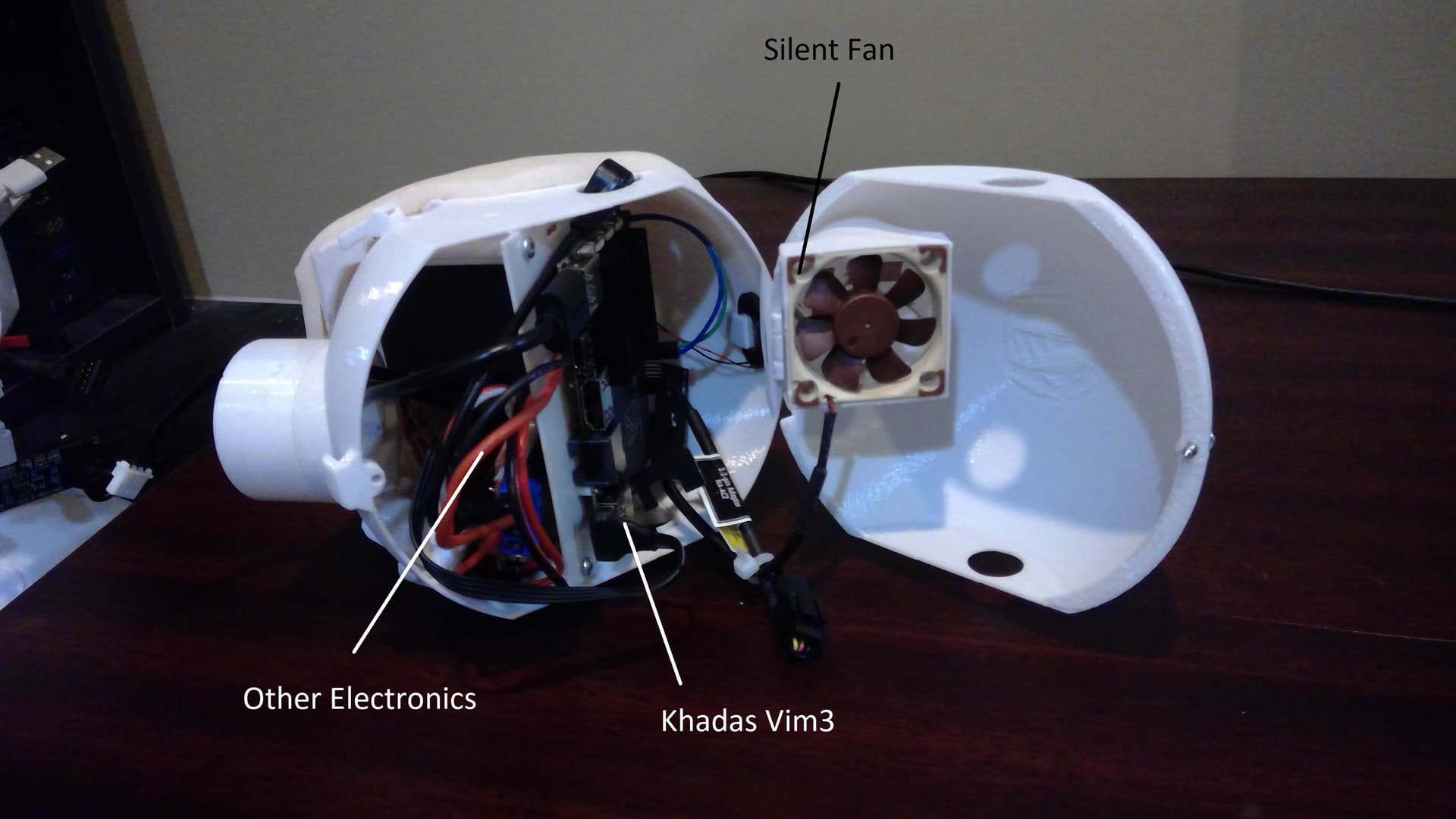

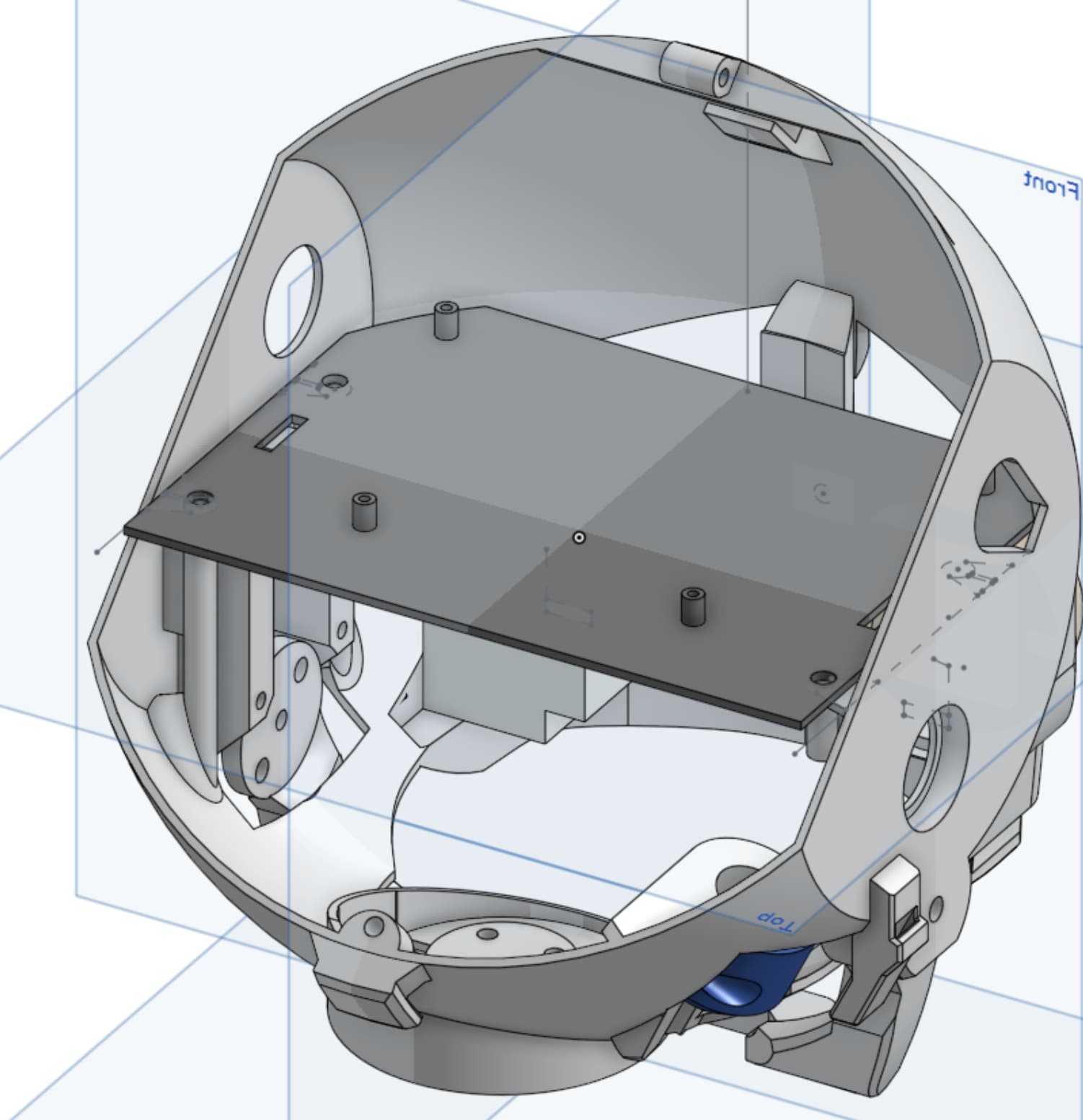
The Khadas vim3 actually lives on a platform in the middle of the head. The top of the head has a cooling system that puts a silent Nocuta 5V fan right on the heatsink of the vim3 and pumps the hot air out of the head using a fan duct. (see fig 9). Below the vim3 lives the rest of the electronics which will we explained more in the electronics section. This head design is quite nice, and it is able to cool the vim3 even under cpu load.
Torso
The torso is divided into two sections, and are able to move in 2 degrees of freedom (DOF). The top section has the arms, neck and breast attachment points. The bottom section has attachment for the legs, and the sex insert.
Arms
The arms are 6 DOF robotic arms that are capable of lifting a 500g payload. They have good movement range, and can reach to the top, and behind the body. The hands are based on the Flexi-hand design which is an open source prosthetic hand design. I have modified it so that it is smaller, and can work with much less force.

Legs
The legs are 4 DOF and are designed for crawling in mind. They have a decent range of motion and the robot can do the splits easily. However, the current hips do not support walking due to a limitation in movement when the legs are fully extended. A different hips design would support walking, but then it would be difficult to make that design look good. Indeed, it is actually very difficult to make the hips functional and also attractive. You need to pack in two strong motors for each leg, and it also needs to move in a wide range of motion, but also look good
Overall
The mechanical design is quite good. The khadas Vim3 is mounted nice and secure in the head and completely silent in operation. The body is tested and functions well. It represents some of the best engineering that I have every done, and I think it is also world class in terms of humanoid robotics. Compared to other humanoid robots, this one fits a unique spot in terms of size, weight, durability, function, attractive appearance, and low cost.
Lilium Robot Cat Girl - Body Demo 1 - YouTube
Also, Here is a youtube video I posted recently demonstrating the movement range of the body.