@Frank Thanks.
The training accuracy: 98%
Validation accuracy: 85%
These were measured during the training of the model.
How can I measure the accuracy of the model now when it is running on the NPU?
@Frank Thanks.
The training accuracy: 98%
Validation accuracy: 85%
These were measured during the training of the model.
How can I measure the accuracy of the model now when it is running on the NPU?
@Akkisony I think you should compare the actual accuracy at runtime, not the accuracy of the training set or validation set
@Frank Thank you for replying.
I measured the score values on Coral TPU and VIM3 NPU for a MobileNetv2 classifier model.
VIM3 - NPU:
Inference time: 36ms
Score value: 53.45%
Coral USB accelerator
Inference time: 10ms
Score value: 96.24%
@Akkisony This is my test with mobilenet v1
khadas@Khadas:~/nbg_unify_mobilenet_tf/bin_r_cv4$ ./mobilenet_tf ../mobilenet_tf.nb ~/ksnn-examples/pytorch/data/goldfish_224x224.jpg
Create Neural Network: 94ms or 94594us
Verify...
Verify Graph: 1ms or 1058us
Start run graph [1] times...
Run the 1 time: 18.00ms or 18688.00us
vxProcessGraph execution time:
Total 18.00ms or 18738.00us
Average 18.74ms or 18738.00us
--- Top5 ---
2: 0.999023
141: 0.000336
121: 0.000160
120: 0.000132
116: 0.000093
@Frank Thank you for verifying.
Can you please check my edge_tpu_tflite model on your PC? Please find the model in the below link.
https://drive.google.com/drive/folders/1RIxQ34wz44mzxODUqy9VIEFaHDWKa3r0?usp=sharing
Thanks again.
@Frank I am sorry. Can you please check the .nb file of my model which I have uploaded now.
https://drive.google.com/drive/folders/1RIxQ34wz44mzxODUqy9VIEFaHDWKa3r0?usp=sharing
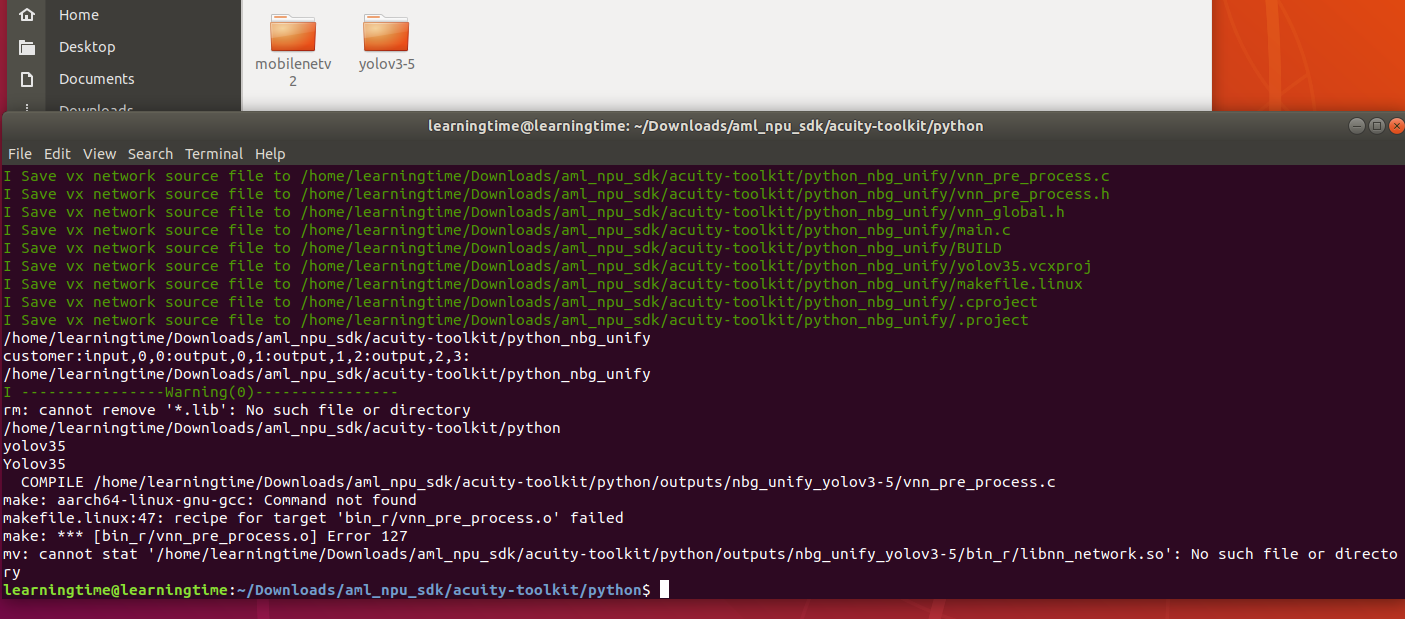
@Frank I am trying to use the NPU Pytho API for conversion. But, I am facing some issues. I cannot generate the .so file.
I think there is problem with the shell scripts, because the script creates a directory named - “yolov3-5” but it searches for “nbg_unify_yolov3-5” to place the .so file.
Can you please check and let me know.
Thanks.
@Akkisony You lose the gcc compile, you need to install it . I remember I already replied to you in the previous post
@Frank Just for confirmation. I have downloaded the ml_npu_sdk on my PC.
So do I have to install gcc tool chain on my PC? As I convert the model on my PC and then copy it to the board.
@Frank I just confirmed. The gcc tool chain is already installed.
If you can see this, I think the script is not able to create a nbg_unify_yolov3-5 directory. Instead it is creating just ‘yolov3-5’ directory.
Please find the image - Missing .so file while converting the model using Python API - #31 by Akkisony
Okay. Thank you for making time to check my model.
Do you have an idea about this Python API SDK? Why is the convert tool not able to create a directory - “nbg_unify_yolov3-5” ?
Thanks again!
@Akkisony I have already explained this problem. Look at the picture you provided, and it clearly says “aarch64-linux-gnu-gcc command not found”.
@Frank I follwed your procudure you explained and added the PATH.
echo $PATH
/home/learningtime/anaconda3/condabin:/home/learningtime/.local/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/usr/local/games:/snap/bin:/opt/toolchains/gcc-linaro-6.3.1-2017.02-x86_64_aarch64-linux-gnu/bin