Hello @Arjun_Gupta ,

First, strides have three, [8, 16, 32].
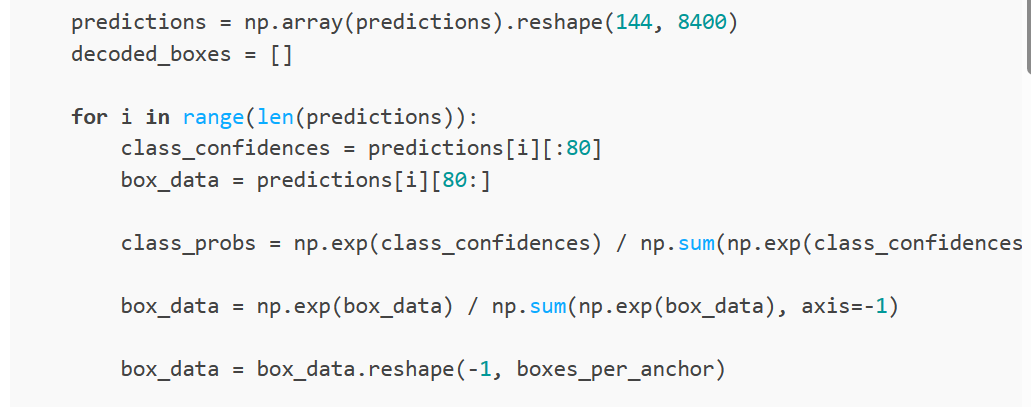
Second, the predictions you reshape into [144, 8400], so the len(predictions) is 144 and the shape of predictions[i][80:] is[1, 8320].
Third, you need to do softmax for four part separately. Divide [64, :] into [16, :]×4 and do softmax for each part.
Last, you missed this step.
Blockquote
Then, each part does softmax and multiplies a constant matrix. The constant matrix is 0-15, shape(1, 16).
The constant matrix.
YOLOv8 demo has been released last Friday. You can refer it.
khadas/ksnn: Khadas Software Neural Network (github.com)
Docs
YOLOv8n KSNN Demo - 2 [Khadas Docs]
This demo’s model output is [1, 144, 80, 80], [1, 144, 40, 40], [1, 144, 20, 20]. You should separate and reshape your output to them.