system info:vim3pro ,linux-mainline-5.17,load from SD card
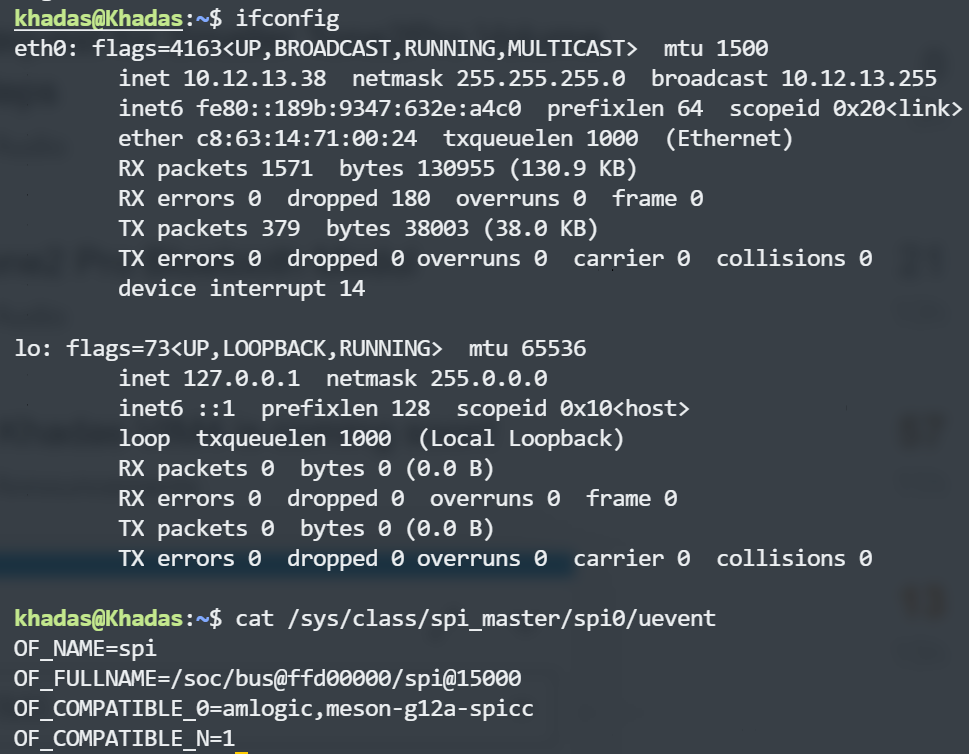
After setup SPI,I found the wifi don’t work,Check ifconfig find no wlan0
so,I try to edit DTS file in mainline linux in /fenix/build/linux-mainline-5.17/arch/arm64/boot/dts/amlogic
to disabled SPI .This time I don’t want to make for a image and reburn it into my SD card.
The whole process took me almost an hour .After a few days of tossing and turning about SPI, I really can’t stand it
In community,I find following steps:
1.edit dtb file
I did those steps.
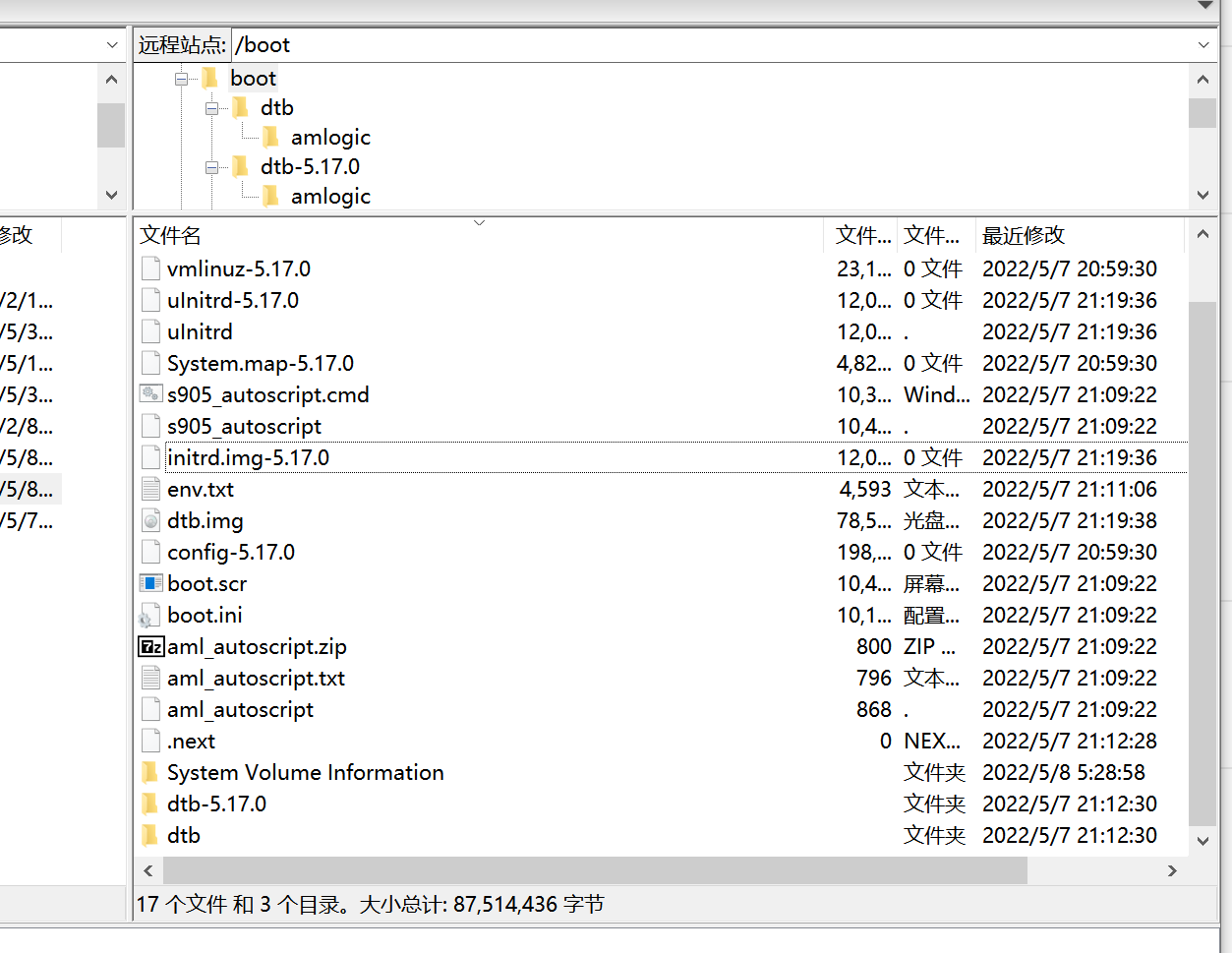
And I also move the dtb file(meson-g12b-a311d-khadas-vim3.dtb ) from /fenix/build/linux-mainline-5.17/arch/arm64/boot/dts/amlogic to/boot/dts/amlogic/ and /boot/dts-5.17.0/amlogic/
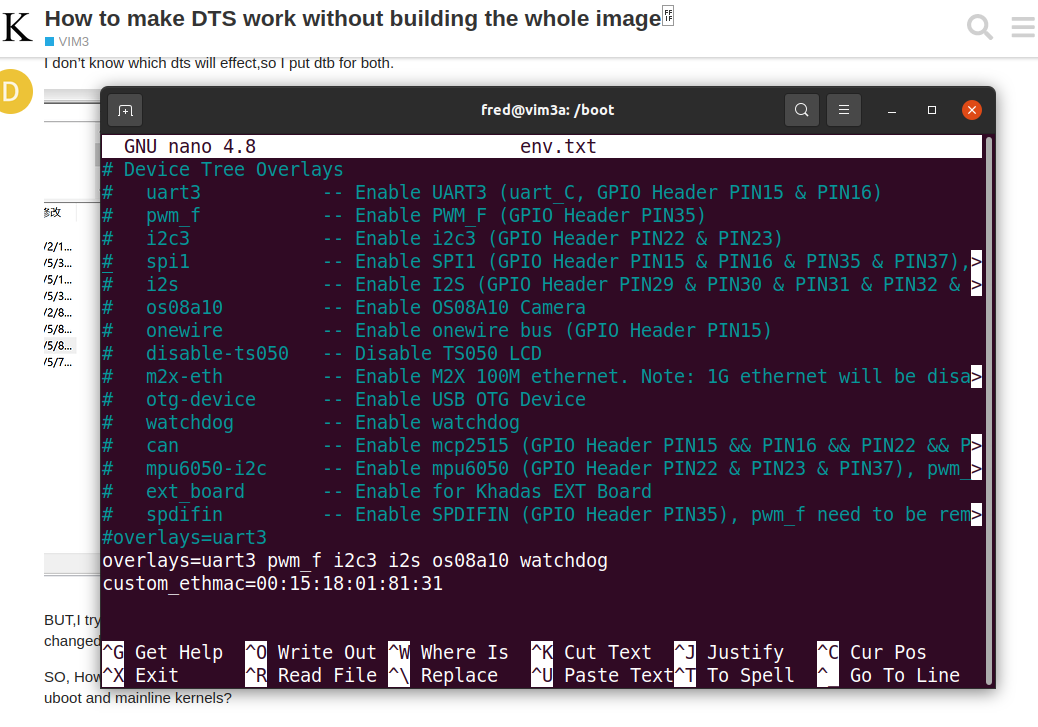
I don’t know which dts will effect,so I put dtb for both.
BUT,I try to disabled SPI, it doesn’t work at all. Only I rebuild the image and reburn it into SD card.It changed,the SPI was disabled.
SO, How to make DTS work without building the whole image?Is it a problem with the use of mainline uboot and mainline kernels?
fred@vim3a:/boot$ ls
aml_autoscript dtb initrd.img uInitrd
aml_autoscript.txt dtb-4.9.241 initrd.img-4.9.241 vmlinuz-4.9.241
aml_autoscript.zip dtb-4.9.241.old remote.conf zImage
boot.ini dtb.img s905_autoscript
boot.scr env.txt s905_autoscript.cmd
config-4.9.241 env.txt.backup System.map-4.9.241
fred@vim3a:/boot$ sudo nano env.txt
[sudo] password for fred:
fred@vim3a:/boot$
Change the line:
overlays=spi1,watchdog
Pins are multiplexed so read the .txt file and make sure you don’t have any conflicts.
You must reboot after saving the updated file.
1 Like
I can’t change anything via overlays.It don’t work
使用VIM3做机器人相关,需要使用spi总线连接两个从机传感器接收数据
Control the robot using the VIM3 and connect two slave sensors using the spi bus to receive data
按照文档激活spi设备
flow steps to setup spi1
编辑env.txt.内容如下:
edit env.txt like:
# Device Tree Overlays
# uart3 -- Enable UART3 (uart_C, GPIO Header PIN15 & PIN16)
# pwm_f -- Enable PWM_F (GPIO Header PIN35)
# i2c3 -- Enable i2c3 (GPIO Header PIN22 & PIN23)
# spi1 -- Enable SPI1 (GPIO Header PIN15 & PIN16 & PIN35 & P…
I also will edit some infos in DTS,It may not appear in overlays config.
So,I just want know how to make edited DTS file works
Hi @DylanMingan
You can follow the steps below to edit and update the dts.
Convert dtb to dts source file
$ dtc -I dtb -O dts /boot/dtb.img -o new-dts.dts
new-dts.dts is current dts source file.
$ vim new-dts.dts
...
$ dtc -I dts -O dtb new-dts.dts -o new-dts.dtb
new-dts.dtb is the new dtb.
$ sudo cp /boot/dtb.img /boot/dtb.img.backup
$ sudo cp new-dts.dtb /boot/dtb.img
$ sync
$ sudo reboot
Acorrding to this code:
spi@14000 {
compatible = "amlogic,meson-gxbb-spifc";
status = "disabled";
reg = <0x00 0x14000 0x00 0x80>;
#address-cells = <0x01>;
#size-cells = <0x00>;
clocks = <0x02 0x0a>;
pinctrl-0 = <0x28>;
pinctrl-names = "default";
phandle = <0x125>;
spi-flash@0 {
#address-cells = <0x01>;
#size-cells = <0x01>;
compatible = "winbond,w25q128fw\0jedec,spi-nor";
reg = <0x00>;
spi-max-frequency = <0x632ea00>;
phandle = <0x126>;
};
};
I add SPI node in DTS like that:
spi@15000 {
compatible = "amlogic,meson-g12a-spicc";
reg = <0x00 0x15000 0x00 0x44>;
interrupts = <0x00 0x5a 0x04>;
clocks = <0x02 0x1d 0x02 0x105>;
clock-names = "core\0pclk";
#address-cells = <0x01>;
//pinctrl-0 = <0x28>; 不知这个值是啥意思
#size-cells = <0x00>;
status = "okay";
pinctrl-names = "default";
phandle = <0x124>;
spidev@0 {
status = "okay";
compatible = "linux,spidev";
/* spi default max clock 100Mhz */
spi-max-frequency = <100000000>;
reg = <0>;
phandle = <0x999>;//任意给了一个值
};
};
But no spidev in /dev.I think it was my mistakes in edit DTS files
I don’t know the meanings of phandle and pinctrl-0.Just set a random value.
Please tell how can i do to make spidev in /dev. I use mainline Linux 5.17.Thanks!
I try it.your method works on 4.9 kernel only in emmc.But i use mainline linux 5.17.it fail to load overlays
Might have to wait until then next LTS version is released.
It is extremely time consuming to get it all working on a standard release then have to go back and test all and modify it again. We are stumbling around here trying and we are not kernel / device tree experts. Its best to use the 4.9 for now.