Hello i am working on a project where i want to time sync a khadas vim 4 with a livox lidar mid 40 and a xsens mti 670 dk .
i am using ubuntu 22.04.5 LTS
and ROS2 env.
For the time sync between khadas vim 4 and livox lidar i follow the livox instructions (https://livox-wiki-en.readthedocs.io/en/latest/tutorials/new_product/common/time_sync.html#appendix-how-to-configure-the-ptp-master-clock
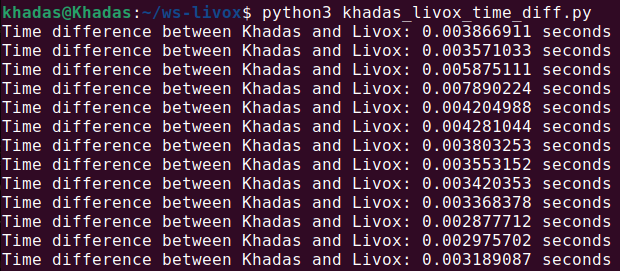
and run hardware time sync using ptp with time diffs like these
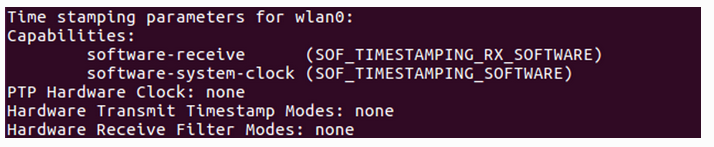
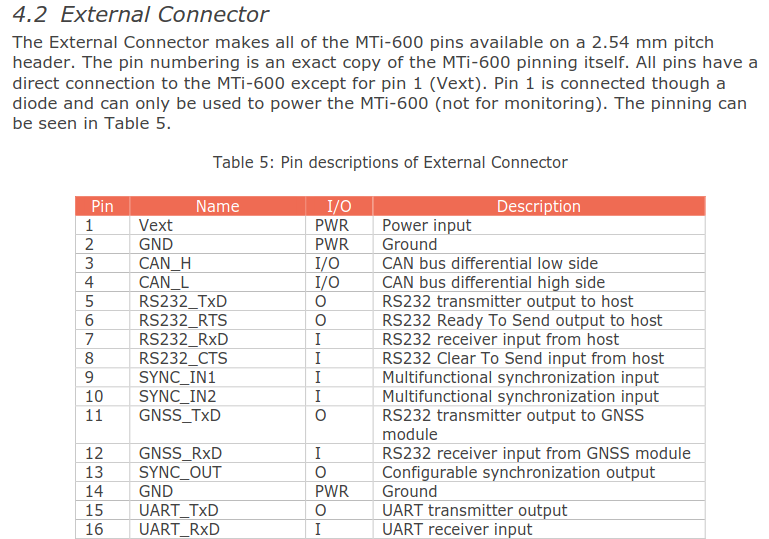
for time sync between khadas and xsens i have to use the uart. so the wiring i make is
khadas pin16 → xsens pin9
khadas pin9 → xsens pin2
so i runb the following code to send a pulse to xsens and check their time diff.
import serial
import time
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import TimeReference # Correct message type
class TimeDiffMonitor(Node):
def __init__(self):
super().__init__('time_diff_monitor')
# Subscribe to the correct Xsens time topic
self.subscriber = self.create_subscription(TimeReference, '/imu/utctime', self.xsens_callback, 10)
self.xsens_time = None
def xsens_callback(self, msg):
# Extract Xsens timestamp from message
self.xsens_time = msg.time_ref.sec + msg.time_ref.nanosec / 1e9
self.get_logger().info(f"Xsens timestamp: {self.xsens_time}")
def get_xsens_time(self):
return self.xsens_time
def send_sync_pulse(ser):
sync_signal = b'SYNC' # Create a sync pulse signal
ser.write(sync_signal) # Send the sync pulse through Pin 16 (TX)
khadas_time = time.time() # Capture Khadas system time
print(f"Sync pulse sent at {khadas_time}")
return khadas_time
def main(args=None):
# Initialize ROS2 node for Xsens time monitoring
rclpy.init(args=args)
time_diff_monitor = TimeDiffMonitor()
# Open UART port for sync pulses
uart_port = '/dev/ttyS4' # Pin 16 TX on Khadas VIM4
baud_rate = 921600
ser = serial.Serial(uart_port, baud_rate)
try:
while rclpy.ok():
# Send sync pulse and get Khadas time
khadas_time = send_sync_pulse(ser)
# Spin ROS2 to process Xsens messages
rclpy.spin_once(time_diff_monitor, timeout_sec=0.1)
# Get the latest Xsens time
xsens_time = time_diff_monitor.get_xsens_time()
if xsens_time is not None:
# Calculate and print time difference
time_diff = abs(khadas_time - xsens_time)
print(f"Time difference between Khadas and Xsens: {time_diff} seconds")
else:
print("Waiting for Xsens time...")
time.sleep(0.1) # For 10 Hz sync pulses
except KeyboardInterrupt:
ser.close()
rclpy.shutdown()
if __name__ == '__main__':
main()
khadas@Khadas:~/ws-livox$ python3 send_timesync2xsens.py
Sync pulse sent at 1728767114.6118355
[INFO] [1728767114.724037827] [time_diff_monitor]: Xsens timestamp: 1728767114.5764368
Time difference between Khadas and Xsens: 0.03539872169494629 seconds
Sync pulse sent at 1728767114.8247092
[INFO] [1728767114.827760909] [time_diff_monitor]: Xsens timestamp: 1728767114.7464366
Time difference between Khadas and Xsens: 0.07827258110046387 seconds
Sync pulse sent at 1728767114.9284568
[INFO] [1728767114.932868393] [time_diff_monitor]: Xsens timestamp: 1728767114.848616
Time difference between Khadas and Xsens: 0.07984089851379395 seconds
but time diff is big. so this has to do with low latency in uart or what?
Please correct me and help me to solve it.
Any help would be appreciated.
Thanks in advance.