Ah that’s a shame. We’re working on a system that uses ML models with 6dof IMU input so were getting really excited about the Vim3!
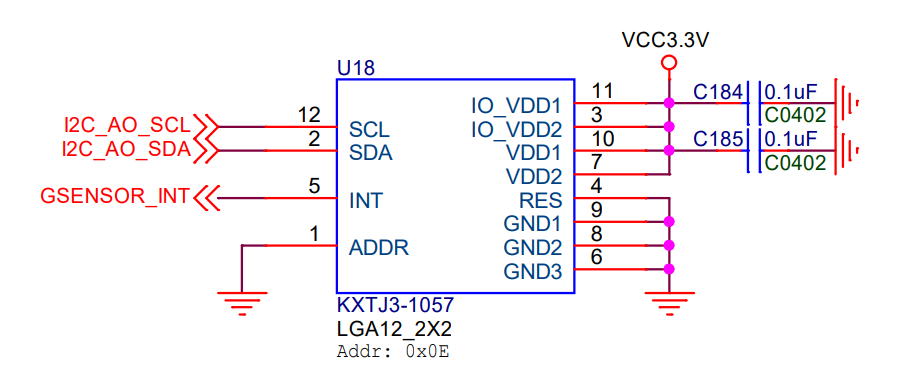
Just to double check, it doesn’t look like the Edge processor has any NPU or ML specific hardware is that correct? Also do you know if the KXTJ is 16-bit - it doesn’t look like it is from the spec sheet.
Just for some feedback if you’re working on the Vim4 - without a gyroscope it will be impossible to produce an accurate Game Rotation Vector within Android, which completely rules out any AR based work. Please consider using something like the Bosch BMI160 IMU that gives you 16 bit accelerometer and gyro and will open up a huge range of options for AR apps using ML.