是一个关于mobilenettf的转换例子,我就是用这个里面的**.sh来输出我的yolo 模型vnn_fruitdetect.c和.h的文件,然后我把生成的vnn_fruitdetect.c和你们gitlab给的yolo_v3 demo里面的vnn_yolov3.c这个函数做对比,会多出image process部分,如下:
vnn_fruitdetect.c(详细内容可点开查看)
/****************************************************************************
* Generated by ACUITY 5.11.0
* Match ovxlib 1.1.21
*
* Neural Network appliction network definition source file
****************************************************************************/
/*-------------------------------------------
Includes
-------------------------------------------*/
#include <stdio.h>
#include <stdlib.h>
#include "vsi_nn_pub.h"
#include "vnn_global.h"
#include "vnn_fruitdetect.h"
/*-------------------------------------------
Macros
-------------------------------------------*/
#define NEW_VXNODE(_node, _type, _in, _out, _uid) do {\
_node = vsi_nn_AddNode( graph, _type, _in, _out, NULL );\
_node->uid = (uint32_t)_uid; \
if( NULL == _node ) {\
goto error;\
}\
} while(0)
#define NEW_VIRTUAL_TENSOR(_id, _attr, _dtype) do {\
memset( _attr.size, 0, VSI_NN_MAX_DIM_NUM * sizeof(uint32_t));\
_attr.dim_num = VSI_NN_DIM_AUTO;\
_attr.vtl = !VNN_APP_DEBUG;\
_attr.is_const = FALSE;\
_attr.dtype.vx_type = _dtype;\
_id = vsi_nn_AddTensor( graph, VSI_NN_TENSOR_ID_AUTO,\
& _attr, NULL );\
if( VSI_NN_TENSOR_ID_NA == _id ) {\
goto error;\
}\
} while(0)
// Set const tensor dims out of this macro.
#define NEW_CONST_TENSOR(_id, _attr, _dtype, _ofst, _size) do {\
data = load_data( fp, _ofst, _size );\
_attr.vtl = FALSE;\
_attr.is_const = TRUE;\
_attr.dtype.vx_type = _dtype;\
_id = vsi_nn_AddTensor( graph, VSI_NN_TENSOR_ID_AUTO,\
& _attr, data );\
free( data );\
if( VSI_NN_TENSOR_ID_NA == _id ) {\
goto error;\
}\
} while(0)
// Set generic tensor dims out of this macro.
#define NEW_NORM_TENSOR(_id, _attr, _dtype) do {\
_attr.vtl = FALSE;\
_attr.is_const = FALSE;\
_attr.dtype.vx_type = _dtype;\
_id = vsi_nn_AddTensor( graph, VSI_NN_TENSOR_ID_AUTO,\
& _attr, NULL );\
if( VSI_NN_TENSOR_ID_NA == _id ) {\
goto error;\
}\
} while(0)
// Set generic tensor dims out of this macro.
#define NEW_NORM_TENSOR_FROM_HANDLE(_id, _attr, _dtype) do {\
_attr.vtl = FALSE;\
_attr.is_const = FALSE;\
_attr.dtype.vx_type = _dtype;\
_id = vsi_nn_AddTensorFromHandle( graph, VSI_NN_TENSOR_ID_AUTO,\
& _attr, NULL );\
if( VSI_NN_TENSOR_ID_NA == _id ) {\
goto error;\
}\
} while(0)
#define NET_NODE_NUM (1)
#define NET_NORM_TENSOR_NUM (3)
#define NET_CONST_TENSOR_NUM (0)
#define NET_VIRTUAL_TENSOR_NUM (2)
#define NET_TOTAL_TENSOR_NUM (NET_NORM_TENSOR_NUM + NET_CONST_TENSOR_NUM + NET_VIRTUAL_TENSOR_NUM)
/*-------------------------------------------
Local Variables
-------------------------------------------*/
/*-------------------------------------------
Functions
-------------------------------------------*/
static uint8_t* load_data
(
FILE * fp,
size_t ofst,
size_t sz
)
{
uint8_t* data;
int32_t ret;
data = NULL;
if( NULL == fp )
{
return NULL;
}
ret = fseek(fp, ofst, SEEK_SET);
if (ret != 0)
{
VSILOGE("blob seek failure.");
return NULL;
}
data = (uint8_t*)malloc(sz);
if (data == NULL)
{
VSILOGE("buffer malloc failure.");
return NULL;
}
ret = fread(data, 1, sz, fp);
return data;
} /* load_data() */
vsi_nn_graph_t * vnn_CreateFruitdetect
(
const char * data_file_name,
vsi_nn_context_t in_ctx,
//删除了下面的图像处理部分
const vsi_nn_preprocess_map_element_t * pre_process_map,
uint32_t pre_process_map_count,
const vsi_nn_postprocess_map_element_t * post_process_map,
uint32_t post_process_map_count
)
{
vsi_status status;
vsi_bool release_ctx;
vsi_nn_context_t ctx;
vsi_nn_graph_t * graph;
vsi_nn_node_t * node[NET_NODE_NUM];
vsi_nn_tensor_id_t norm_tensor[NET_NORM_TENSOR_NUM];
vsi_nn_tensor_attr_t attr;
FILE * fp;
uint8_t * data;
//删除了下面的图像处理部分
uint32_t i = 0;
char * use_img_process_s;
int32_t enable_pre_post_process = 0;
ctx = NULL;
graph = NULL;
status = VSI_FAILURE;
memset( &attr, 0, sizeof( attr ) );
fp = fopen( data_file_name, "rb" );
if( NULL == fp )
{
VSILOGE( "Open file %s failed.", data_file_name );
goto error;
}
if( NULL == in_ctx )
{
ctx = vsi_nn_CreateContext();
}
else
{
ctx = in_ctx;
}
graph = vsi_nn_CreateGraph( ctx, NET_TOTAL_TENSOR_NUM, NET_NODE_NUM );
if( NULL == graph )
{
VSILOGE( "Create graph fail." );
goto error;
}
vsi_nn_SetGraphVersion( graph, VNN_VERSION_MAJOR, VNN_VERSION_MINOR, VNN_VERSION_PATCH );
vsi_nn_SetGraphInputs( graph, NULL, 1 );
vsi_nn_SetGraphOutputs( graph, NULL, 2 );
/*-----------------------------------------
Register client ops
-----------------------------------------*/
/*-----------------------------------------
Node definitions
-----------------------------------------*/
/*-----------------------------------------
lid - nbg_0
var - node[0]
name - nbg
operation - nbg
input - [320, 240, 3, 1]
output - [20, 15, 48, 1]
[40, 30, 48, 1]
-----------------------------------------*/
NEW_VXNODE(node[0], VSI_NN_OP_NBG, 1, 2, 0);
node[0]->nn_param.nbg.type = VSI_NN_NBG_FILE;
node[0]->nn_param.nbg.url = data_file_name;
/*-----------------------------------------
Tensor initialize
-----------------------------------------*/
attr.dtype.fmt = VSI_NN_DIM_FMT_NCHW;
/* @input_0:out0 */
attr.size[0] = 320;
attr.size[1] = 240;
attr.size[2] = 3;
attr.size[3] = 1;
attr.dim_num = 4;
attr.dtype.fl = 7;
attr.dtype.qnt_type = VSI_NN_QNT_TYPE_DFP;
NEW_NORM_TENSOR(norm_tensor[0], attr, VSI_NN_TYPE_INT8);
/* @output_19:out0 */
attr.size[0] = 20;
attr.size[1] = 15;
attr.size[2] = 48;
attr.size[3] = 1;
attr.dim_num = 4;
attr.dtype.fl = 1;
attr.dtype.qnt_type = VSI_NN_QNT_TYPE_DFP;
NEW_NORM_TENSOR(norm_tensor[1], attr, VSI_NN_TYPE_INT8);
/* @output_26:out0 */
attr.size[0] = 40;
attr.size[1] = 30;
attr.size[2] = 48;
attr.size[3] = 1;
attr.dim_num = 4;
attr.dtype.fl = 1;
attr.dtype.qnt_type = VSI_NN_QNT_TYPE_DFP;
NEW_NORM_TENSOR(norm_tensor[2], attr, VSI_NN_TYPE_INT8);
/*-----------------------------------------
Connection initialize
-----------------------------------------*/
node[0]->input.tensors[0] = norm_tensor[0];
node[0]->output.tensors[0] = norm_tensor[1];
node[0]->output.tensors[1] = norm_tensor[2];
/* nbg_0 */
graph->input.tensors[0] = norm_tensor[0];
graph->output.tensors[0] = norm_tensor[1];
graph->output.tensors[1] = norm_tensor[2];
//删除了下面的图像处理部分
use_img_process_s = getenv( "VSI_USE_IMAGE_PROCESS" );
if( use_img_process_s )
{
enable_pre_post_process = atoi(use_img_process_s);
}
if( enable_pre_post_process )
{
if( pre_process_map_count > 0 )
{
for( i = 0; i < pre_process_map_count; i++ )
{
status = vsi_nn_AddGraphPreProcess(graph, pre_process_map[i].graph_input_idx,
pre_process_map[i].preprocesses,
pre_process_map[i].preprocess_count);
TEST_CHECK_STATUS( status, error );
}
}
if( post_process_map_count > 0 )
{
for( i = 0; i < post_process_map_count; i++ )
{
status = vsi_nn_AddGraphPostProcess(graph, post_process_map[i].graph_output_idx,
post_process_map[i].postprocesses,
post_process_map[i].postprocess_count);
TEST_CHECK_STATUS( status, error );
}
}
status = vsi_nn_SetupGraph( graph, TRUE );
TEST_CHECK_STATUS( status, error );
}
else
{
status = vsi_nn_SetupGraph( graph, FALSE );
TEST_CHECK_STATUS( status, error );
}
if( VSI_FAILURE == status )
{
goto error;
}
fclose( fp );
return graph;
error:
if( NULL != fp )
{
fclose( fp );
}
release_ctx = ( NULL == in_ctx );
vsi_nn_DumpGraphToJson( graph );
vnn_ReleaseFruitdetect( graph, release_ctx );
return NULL;
} /* vsi_nn_CreateFruitdetect() */
void vnn_ReleaseFruitdetect
(
vsi_nn_graph_t * graph,
vsi_bool release_ctx
)
{
vsi_nn_context_t ctx;
if( NULL != graph )
{
ctx = graph->ctx;
vsi_nn_ReleaseGraph( &graph );
/*-----------------------------------------
Unregister client ops
-----------------------------------------*/
if( release_ctx )
{
vsi_nn_ReleaseContext( &ctx );
}
}
} /* vsi_nn_ReleaseFruitdetect() */
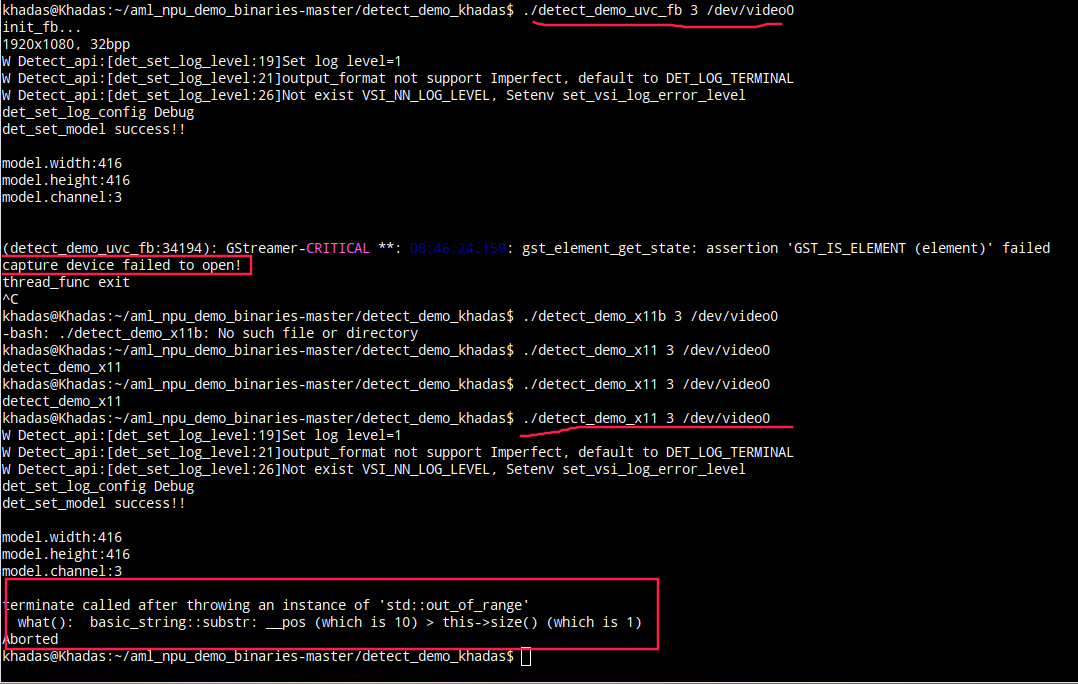
所以为了保持和你们vnn_yolov3.c的一致性(你们demo的代码我看图像处理部分,是在yolo_v3_process.c里面的),我就删了vnn_fruitdetect.c里面关于图像处理部分的代码。是不是我用的2_export_cae_code.sh哪里有问题
 )
)